Избыточное цитирование
У меня на пин STBY подан постоянный плюс, нужен какой то таймер в код добавить, защиту как бы. Я так это понимаю:если сейчас движение вперед и жму сменить направление (назад), то моторы стопорятся например на секунду и только после этого происходит движение назад.@Demka777 если я правильно понял, то предыдущий комментатор имеет в виду 4 провода управления, включая STBY - этот пин управляет состоянием драйвера вкл/выкл, если подать на него высокий и низкий сигнал соответственно. По факту этим драйвером можно управлять и 3 проводами, если подать постоянный высокий сигнал на STBY (соединить с линией +5V). Если это не поможет, попробуйте самый простой вариант управления без библиотеки Гайвера, который использую я в том числе:
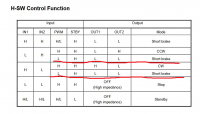
Посмотреть вложение 31525C++://условное движение вперед на примере одного мотора digitalWrite(STBY, HIGH);// STBY -здесь пин ардуины, подключенный к пину STBY драйвера, если задействуется пин управления вкл/выкл драйвера digitalWrite(AIN1, LOW);// AIN1 - здесь пин ардуины, подключенный к пину AIN1 драйвера digitalWrite(AIN2, HIGH);// AIN2 - здесь пин ардуины, подключенный к пину AIN2 драйвера] analogWrite(PWMA, pwm);// PWMA - здесь пин ардуины (обязательно должен поддерживать ШИМ), подключенный к пину PWMA драйвера, pwm - значение в диапазоне 0-255(чем выше, тем больше скорость) //условное движение назад на примере одного мотора digitalWrite(STBY, HIGH);// если задействуется пин управления вкл/выкл драйвера digitalWrite(AIN1, HIGH); digitalWrite(AIN2, LOW); analogWrite(PWMA, pwm); //условный стоп на примере одного мотора digitalWrite(AIN1, LOW); digitalWrite(AIN2, LOW); //или: digitalWrite(STBY, LOW); //если используется пин