
Рефералки запрещены, см. правила. Исправь или ветка будет удалена. Срок 1 час
Начало темы было тут: https://community.alexgyver.ru/threads/linnjnoe-preobrazovanie-naprjazhenija.4722/#post-73617
Разговор пойдёт вот про этот энкодер
Смысл данного энкодера в том, что он показывает не сколько вы сделали шагов влево или вправо, а работает по принципу потенциометра постоянного вращения, то есть в каждый момент времени вы знаете в каком именно он положении. Огромный его плюс заключается в том что у него нет соприкасающихся механических частей, а значит со временем он не будет вносить погрешности в измерения. На выходе энкодер даёт сигнал 0-5в, и как было выснено эмпирическим путём сильно требователен к качеству напряжения на нём (он требует те самые 5в.) Данные я с него снимаю stm32 в 10битном режиме АЦП, схема подключения в настоящий момнет выглядит вот так:
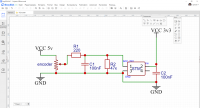
При статичном положении вала погрешность показаний STM32 (напомню в 10битном режиме) составляет +/-2,5 ед (с редкими исключениями).
Кто-либо добивался лучших показателей?
Разговор пойдёт вот про этот энкодер
Смысл данного энкодера в том, что он показывает не сколько вы сделали шагов влево или вправо, а работает по принципу потенциометра постоянного вращения, то есть в каждый момент времени вы знаете в каком именно он положении. Огромный его плюс заключается в том что у него нет соприкасающихся механических частей, а значит со временем он не будет вносить погрешности в измерения. На выходе энкодер даёт сигнал 0-5в, и как было выснено эмпирическим путём сильно требователен к качеству напряжения на нём (он требует те самые 5в.) Данные я с него снимаю stm32 в 10битном режиме АЦП, схема подключения в настоящий момнет выглядит вот так:
При статичном положении вала погрешность показаний STM32 (напомню в 10битном режиме) составляет +/-2,5 ед (с редкими исключениями).
Кто-либо добивался лучших показателей?