
Суть:
В своем экспедиционном автомобиле заменить ненадежную и неудобную гидравлическую подвеску на удобную, надежную, и с помощью Ардуино, функциональную пневматическую подвеску.
Требования к подвеске принудили остпновить выбор на пневматике:
С решением в управлении выбрать Ардуино появились дополнительные возможности:
По механической части проблем и вопросов нет — все продумал, прощитал, подобрал и частично установил, кое что еще по пути из Китая, США и других мест. А вот с электроникой вопросы имеются. Это мой первый проэкт по Ардуино и вообще по электронике. Освоил DipTrace сделал схему и плату пульта управления, почти сделал схему обвязки Arduino Mega Pro (Nano для сей задачи слабоват). Встал на решении подключения датчика угла наклона. Из всех найденых на просторах китайского предложения выбрал такой: https://www.aliexpress.com/item/33009562857.html
Хотя для пробы заказал и других разных 7 шт., вопрос заключается в том как лучше его подсоединить — по аналоговой или по цифровой части? Как лучше и быстрее будет работать?
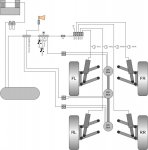
Для начала пневмосхема системы:
Разберусь с этим датчмком, схема будет закончена и подготовлена для вашего обзора, а чуть позже изложу принципы и режимы работы. Мне на кирилице пока получается медленно, так то извините за скорость выхода сообщений и ответов
Русский язык мне не родной, из за ошибок прошу запись не удалять, за указанные ошибки буду благодарен и исправлю текст.
В своем экспедиционном автомобиле заменить ненадежную и неудобную гидравлическую подвеску на удобную, надежную, и с помощью Ардуино, функциональную пневматическую подвеску.
Требования к подвеске принудили остпновить выбор на пневматике:
- Мягкая, удобная и надежная
- Возможность поднять кузов на бездорожье
- Возможность выставить машину ровно на пересеченной местности (для сна)
С решением в управлении выбрать Ардуино появились дополнительные возможности:
- Автоматическая поддержка горизонтального положения кузова двигаясь по склонам
- Контроль и устранение вывешивания двигаясь по камням и другим неровностям
- Автоматическая калибровка подвески
- Динамическим изменением давления в стойках убирать качку или крены при поворотах или торможении
- еще не придумал
По механической части проблем и вопросов нет — все продумал, прощитал, подобрал и частично установил, кое что еще по пути из Китая, США и других мест. А вот с электроникой вопросы имеются. Это мой первый проэкт по Ардуино и вообще по электронике. Освоил DipTrace сделал схему и плату пульта управления, почти сделал схему обвязки Arduino Mega Pro (Nano для сей задачи слабоват). Встал на решении подключения датчика угла наклона. Из всех найденых на просторах китайского предложения выбрал такой: https://www.aliexpress.com/item/33009562857.html
Хотя для пробы заказал и других разных 7 шт., вопрос заключается в том как лучше его подсоединить — по аналоговой или по цифровой части? Как лучше и быстрее будет работать?
Для начала пневмосхема системы:
Разберусь с этим датчмком, схема будет закончена и подготовлена для вашего обзора, а чуть позже изложу принципы и режимы работы. Мне на кирилице пока получается медленно, так то извините за скорость выхода сообщений и ответов
Русский язык мне не родной, из за ошибок прошу запись не удалять, за указанные ошибки буду благодарен и исправлю текст.
