
Приветствую всех ардуинофилов и ардуинофобов. Представляем вашему вниманию робокопилку. В роботе применен всего один сервопривод, датчик расстояния и контроллер ардуино. Проект подходит для сборки начинающим разработчикам при условии, что у вас есть паяльник, 3д-принтер и большой адронный коллайдер.
Если положить мелкий предмет роботу в руки, он немедленно заглатывает содержимое в себя.

![[IMG]](https://static.wixstatic.com/media/22baca_ecabaf74974e4228b779e7322e02e30b~mv2.gif)
Детали для печати корпуса на 3д-принтере лежат на thingiverse.
Для сборки проекта понадобится:
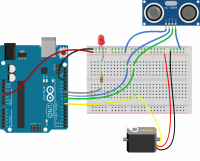
Вместо Arduino Uno (на схеме) нужно использовать Arduino Pro Mini. Компактная плата легко умещается в голове робота, на то она и mini.
Ниже пример базового кода для загрузки в контроллер. При желании можете улучшить его и поделиться своим вариантом.
И на прощание видеоролик с процессом создания робота.
Если положить мелкий предмет роботу в руки, он немедленно заглатывает содержимое в себя.
Детали для печати корпуса на 3д-принтере лежат на thingiverse.
Для сборки проекта понадобится:
- Arduino pro mini
- Ультразвуковой дальномер HC-SR04
- Сервопривод SG90 или аналогичный
- Блок питания 5V
- Корпус напечатанный на 3D-принтере
- Светодиод и резистор 220 Ом (по желанию)
Вместо Arduino Uno (на схеме) нужно использовать Arduino Pro Mini. Компактная плата легко умещается в голове робота, на то она и mini.
Ниже пример базового кода для загрузки в контроллер. При желании можете улучшить его и поделиться своим вариантом.
Скетч для загрузки в Arduino IDE:
// Пины для подключения дальномера, светодиода, сервопривода//
#define trigPin 9 //
#define echoPin 8 //
#define led 10 //
#define servopin 7 //
//основные параметры
#define chewing 4 // Сколько раз пережёвываем проглоченное
#define blizost 10 // Расстояние, до которого будет реагировать датчик (в сантиметрах)
//состояния открытия рта. Всего их три: закрыт, открыт, приоткрыт.
//Настраиваются индивидуально под каждый сервопривод (значения от 0 до 180 градусов).
#define mouthClose 90 // Рот закрыт
#define mouthOpen 30 // Рот открыт
#define mouthAjar 70 // Рот приоткрыт
#include <Servo.h> // Подключаем библиотеку сервопривода
Servo Sergo;
void setup() {
Serial.begin(9600); //Инициализируем последовательный порт чтобы выводить в него расстояния определенное датчиком
pinMode(trigPin, OUTPUT); //
pinMode(echoPin, INPUT);
Sergo.attach(servopin); // в скобках номера пина к которому подключен сервопривод
sleep(); // установим сервопривод в исходное положение, т.е. рот закрыт
}
void loop() {
int duration, distance;
digitalWrite(trigPin, LOW); // Для большей точности установим значение LOW на пине Trig
delayMicroseconds(2);
digitalWrite(trigPin, HIGH); // Теперь установим высокий уровень на пине Trig
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH); // Узнаем длительность высокого сигнала на пине Echo
//Переводим скорость звука из 343 м/с в см/мкс: s = duration/29
//Поскольку расстояние пройдено дважды, то s = duration / (29*2)
distance = duration / 58; // Рассчитываем расстояние в сантиметрах
Serial.print(distance); // Выведем значение в Serial Monitor
Serial.println(" cm");
if (distance < blizost) { // Если расстояние до предмета меньше заданного, то проглатываем
om_nom_nom();
digitalWrite(led, HIGH);
}
delay(100);
}
void om_nom_nom() {
digitalWrite(led, HIGH); // Зажигаем лампочкой
Sergo.attach(servopin); // Подключаем сервопривод
delay(200); // Задержка поле детектирования объекта в зоне видимости
Sergo.write(mouthOpen); // открываем рот и ждем пока предмет свалится в него
delay(700);
// жуем //
for (int x = 0; x < chewing; x++) {
Sergo.write(mouthAjar);
delay(250);
Sergo.write(mouthOpen);
delay(250);
Serial.println("nyam");
}
sleep(); //спим
}
void sleep(){
Sergo.write(mouthClose);
delay(250);
Sergo.detach(); // отключаем питание сервопривода, иначе он будет жужжать
digitalWrite(led, LOW); // гасим светодиод
}