
Для красоты хочется что бы все мигало и блестело, переливалось красками )
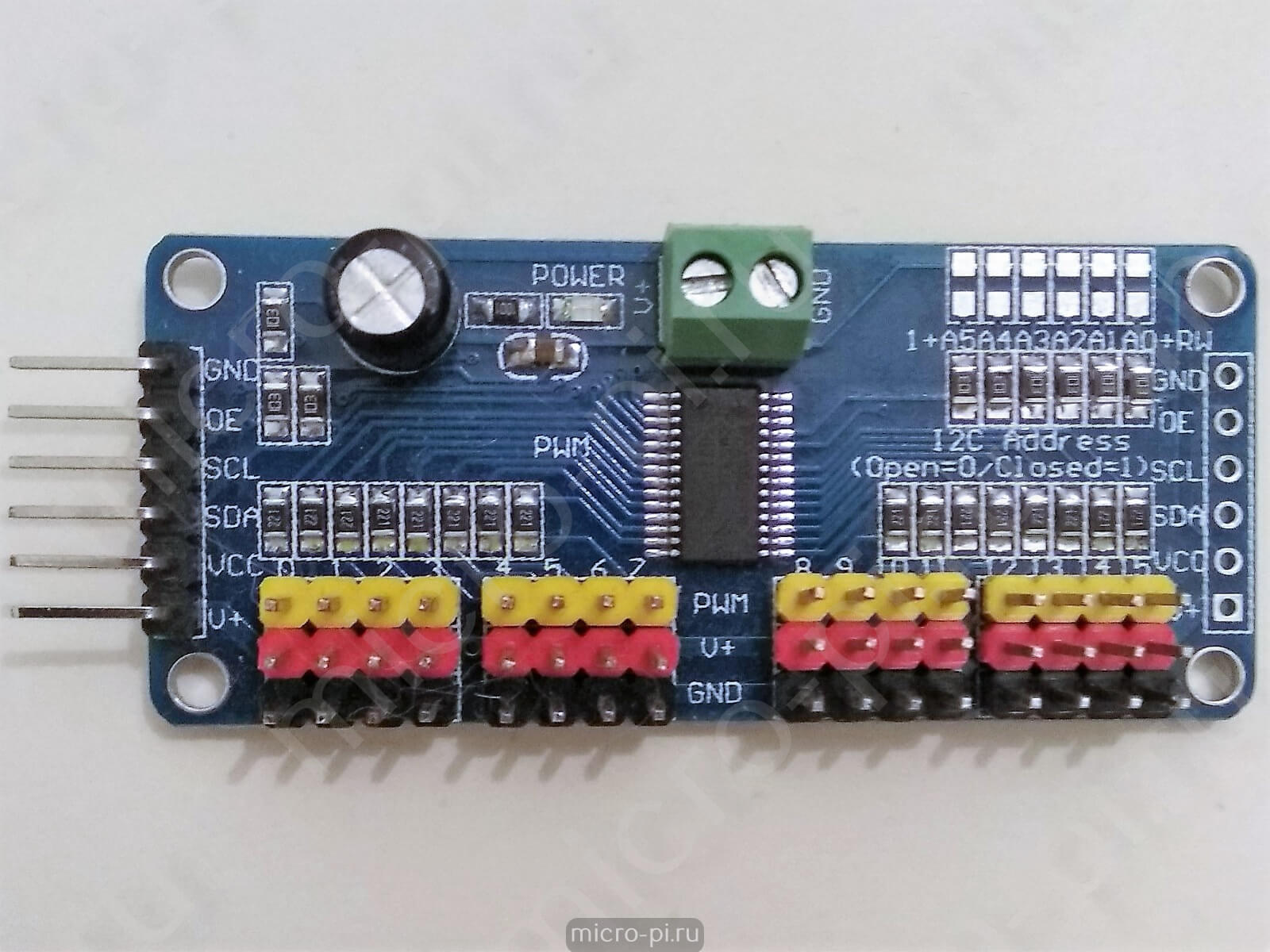
Делать все планируется разного размера и цвета светодиодами , подключаемыми к мультисерво шилду, вот такому
 Требуется некое кол-во идей, что можно еще добавить.
Требуется некое кол-во идей, что можно еще добавить.
Пока есть такие мысли
Головная оптка:
1) Крупные белые светодиод - фары, при движении вперед горят ярко, при движении назад и остановке горят тускло. Можно сделать , что тускло гореть начинают после некоторого времени простоя. Да, наверное исправлю на такое. Может быть отключено кнопкой включения / выключения света на пульте.
2) Поворотники. Две пары желтых, мелких светодиода мигающие с определенной частотой. Включаются при отклонении рулевого колеса вправо или влево.
Задние фонари:
1) Стоп сигнал. При снижении PWM сигнала в сторону заднего хода горит ярко красным цветом, при движении вперед или остановке горит тускло. Наверное введу такое же условие , как и для головного света, что если стоит больше n секунд, то загорается ярко.
2) Фонарь заднего хода, включается при движении задним ходом, в остальное время выключен.
Вся эта обвеска работает в автономном режиме, т.е. не требует внимания оператора.
Что можно добавить в будущем:
1) Фара-искатель. Несколько белых светодиодов на крышу. Но включать надо будет с пульта. Под вопросом.
2) Аварийка. Те же поворотники, но работать начинают после того, как куда то врежешься, для этого надо поставить акселерометр. Далекое будущее, тоже под вопросом пока.
аварийка.
На макетке все работает.
Буду рад комментариям
ЗЫ. Как изменить размер картинки ? Что то она на пол экрана...
Делать все планируется разного размера и цвета светодиодами , подключаемыми к мультисерво шилду, вот такому
Пока есть такие мысли
Головная оптка:
1) Крупные белые светодиод - фары, при движении вперед горят ярко, при движении назад и остановке горят тускло. Можно сделать , что тускло гореть начинают после некоторого времени простоя. Да, наверное исправлю на такое. Может быть отключено кнопкой включения / выключения света на пульте.
2) Поворотники. Две пары желтых, мелких светодиода мигающие с определенной частотой. Включаются при отклонении рулевого колеса вправо или влево.
Задние фонари:
1) Стоп сигнал. При снижении PWM сигнала в сторону заднего хода горит ярко красным цветом, при движении вперед или остановке горит тускло. Наверное введу такое же условие , как и для головного света, что если стоит больше n секунд, то загорается ярко.
2) Фонарь заднего хода, включается при движении задним ходом, в остальное время выключен.
Вся эта обвеска работает в автономном режиме, т.е. не требует внимания оператора.
Что можно добавить в будущем:
1) Фара-искатель. Несколько белых светодиодов на крышу. Но включать надо будет с пульта. Под вопросом.
2) Аварийка. Те же поворотники, но работать начинают после того, как куда то врежешься, для этого надо поставить акселерометр. Далекое будущее, тоже под вопросом пока.
аварийка.
На макетке все работает.
Буду рад комментариям
ЗЫ. Как изменить размер картинки ? Что то она на пол экрана...
Изменено:

