
Цель проекта создать телеуправляемого аватара с возможностью автономной работы. Цель далеко, на пути к ней интересные задачи, ими и займемся.
Танк
- Автор темы РыкаВладимир
- Дата начала

Снял: контроллер, звук, дым пневмопушку...
осталось шасси, и двигателя с редукторами.

Добавил аккумулятор, понижающий dc-dc, ардуино нано, приёмник флайскай,
пару драйверов l298n по одному на двигатель.

Поставил два по одному на двигатель. Через несколько минут один из них умер. Нужен подходящий драйвер.
В перспективе использование 18V аккумуляторов и моторов электроинструмента, по причине их массового производства.
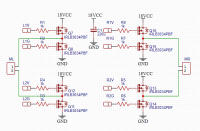
Всю логику оставляем NANO, в качестве ключей логические мосфеты IRLB3034.
Изменено:
К сожалению схема не рабочая. На затворах мосфетов (Q7, Q16, Q12, Q13) напряжение падает с 5v lдо 2v и они почти не открываются(.
Изменено:
https://community.alexgyver.ru/threads/dlja-detej-kak-lego.1398/ пост №8 драйвер на базе АО4606 и подобных. Если сам драйвер не подойдет (он до 5А макс. и 20-30в тоже в макс. И это НЕ значит что И то И другое!) то его можно взять за основу. Там только одна особенность - аккуратное программирование времен закрытия/открытия при смене направлений. Дальше в теме, пост 74 или около него, есть пример кода управления таким драйвером.
От недостатка знаний и опыта. Не видел тонкостей создания разницы потенциалов между затвором и стоком.А почему все мосфеты N-канальные?
Думал, что Р канальные используют из за логики , что один сигнал (+ например)одновременно открывает N и закрывает Р.
У N канальных лучше характеристики.
Учту это в очередном драйвере.резисторы должны быть 50 ом максимум
такого не бываетодновременно открывает N и закрывает Р.
между открытием и закрытием нужно обязательно время и оно называется Dead time
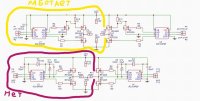
Полумост драйвера с бутстрепом у меня не работает, немножко переделал
Если у кому удалось запустить драйвер https://easyeda.com/beragumbo/H_bridge__IR2104-0b08fb8b54c345a1a575cbd47833915b
Помогите мне я тоже хочу!!!!
Если у кому удалось запустить драйвер https://easyeda.com/beragumbo/H_bridge__IR2104-0b08fb8b54c345a1a575cbd47833915b
Помогите мне я тоже хочу!!!!
Изменено:
Вот правильная схема приаттачена.
Если ставишь транзистор IRLB3034 в качестве ключа, резистор последовательно с затвором не ставится от слова совсем.
Эти транзисторы предназначены для работы от логического уровня.
Только затвор должен сажаться на землю у N канального через резистор 10 КОм
У P канального на + питания.
В случае использования драйвера включать согласно схеме из даташита или из файла, что я дал.
Первая схема какая то странная.
Вторая верна, но кажется с кондёрами переборщили.
Если ставишь транзистор IRLB3034 в качестве ключа, резистор последовательно с затвором не ставится от слова совсем.
Эти транзисторы предназначены для работы от логического уровня.
Только затвор должен сажаться на землю у N канального через резистор 10 КОм
У P канального на + питания.
В случае использования драйвера включать согласно схеме из даташита или из файла, что я дал.
Первая схема какая то странная.
Вторая верна, но кажется с кондёрами переборщили.
Вложения
-
420.6 KB Просмотры: 8
-
524.1 KB Просмотры: 8
@Эдуард Анисимов, Спасибо. Статьи оказались полезными. И все же, есть ли личный опыт работы с драйверами ir2104 и ir2110 в схемах с коллекторным двигателем? Собственно интересно все по управлению двигателями. Уже несколько месяцев не получается добиться практических успехов. Спалил несколько микросхем, пару ардуинок и десятка два мосфетов))). результаты не выкладываю потому как хочется поделиться тем что работает.
Кстати первая схема странная потому что моего изобретения") , вот ее полумост на макетке точно в разных режимах работает и ничего не перегревается!
, вот ее полумост на макетке точно в разных режимах работает и ничего не перегревается!
Кстати первая схема странная потому что моего изобретения
, вот ее полумост на макетке точно в разных режимах работает и ничего не перегревается!Эти микрохемы - драйвера полумостов. Им без разницы чем управлять. Хоть двигателем, хоть блоком питания.ir2104 и ir2110 в схемах с коллекторным двигателем?
Вы пытаетесь сделать мост и это в принципе правильно.
Я уже переболел ими пару лет назад. Использовал только в БП.
Если ничего не путаю и помню правильно, опираясь на Вашу схему, для простого управления входы IN первой микросхемы нужно соединить со входом SD второй и наоборот. Получится два входа, прямой и инверсный. Вот ими уже и рулить. Но можно не соединять, но тогда придётся рулить уже 4мя входами.
И да, насчёт танка. Я тоже на али увидел шасси танка. Тоже была мысля сделать себе игрушку. В детстве не наигрался.
Ещё есть готовые модули, которые могут управлять и коллекторными двигателями и шаговыми. Может на них сделать?
@Эдуард Анисимов, Применение полумоста в блоке питания отличается от применения в "Н" мосте. В блоках питпния нет момента реверса как в полномостовой схеме для коллекторного двигателя постоянного тока. "IN первой микросхемы нужно соединить со входом SD второй и наоборот" это вариант для ir2110, у нее независимые каналы LO и HO. В случае подачи шим на IN ir2104 (синхронизированные каналы с дэдтаймом) получим инвертор (блок питания переменного тока вместо моста). Опять же все это мое, возможно ошибочное видение (с осциллографом не проверял). А вообще идея объединить два входа после Вашей статьи меня тоже посетила, сделаю позже.
C готовыми драйверами неудобство в том, что у них жёстко объединена логическая и силовая часть. Шасси танка это маленькая ступенька проекта, нужна возможность свободно изменять как силовую часть так и логику работы драйвера (количество , мощность движков и взаимосвязь их работы друг с другом и с датчиками).
C готовыми драйверами неудобство в том, что у них жёстко объединена логическая и силовая часть. Шасси танка это маленькая ступенька проекта, нужна возможность свободно изменять как силовую часть так и логику работы драйвера (количество , мощность движков и взаимосвязь их работы друг с другом и с датчиками).
Изменено:
Глянул даташит .. какойто мутный драйвер:
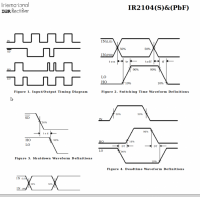
not SD - это сигнал shutdown а вовсе не управление. При его низком уровне - оба выхода идут в 0, и получается что in - направление работы внутреннего выходного полумоста .. и только. Это точно "драйвер" для усиления мосфетами далее?
not SD - это сигнал shutdown а вовсе не управление. При его низком уровне - оба выхода идут в 0, и получается что in - направление работы внутреннего выходного полумоста .. и только. Это точно "драйвер" для усиления мосфетами далее?
Что то я немного лоханулся.
Да это драйвер управления мосфетами.
Его особенность - полное управление через один вход в отличие от IR2110 у которого каждым плечом должен управлять сам.
Если включать его в мост, на один кристалл подаётся прямое напряжение на другой инверсное.
Да это драйвер управления мосфетами.
Его особенность - полное управление через один вход в отличие от IR2110 у которого каждым плечом должен управлять сам.
Если включать его в мост, на один кристалл подаётся прямое напряжение на другой инверсное.
@РыкаВладимир, не смотрю "видео" и не тащу "всякую каку в рот" схемы из интернета, к сожалению. Судя по даташиту, на выходе микросхемы стоит свой полумост, а вовсе не выходы для управления силовыми мосфетами. Но .. я не вчитывался в даташит, возможно есть и такое применение. По мне, так это все равно что "чесать левой пяткой левое же ухо", но тут возможно и не прав - не вглядывался в даташит.
Если мне что-то надо сделать, то всегда стараюсь нарыв кучку (и обязательно разных!) вариантов применения в Сети, залезть в даташит и вдумчиво проверить что, кто, почему и как применил "это тут".
А "взял с интернета", "слепил из двух одно", "поможите, сами мы не местные" .. это все не мое, уж извините.
Если мне что-то надо сделать, то всегда стараюсь нарыв кучку (и обязательно разных!) вариантов применения в Сети, залезть в даташит и вдумчиво проверить что, кто, почему и как применил "это тут".
А "взял с интернета", "слепил из двух одно", "поможите, сами мы не местные" .. это все не мое, уж извините.
@Arhat109, Мы с тобой на форуме Алекса так то. Драйвер предложен им в теме про разводку плат, там же дана ссылка на него в изиидеи. Так, что и видос ни левый и вариант драйвера есть смысл обсудить. Если он рабочий - понять, что я делаю ни так, если не рабочий то исправить. Как ты считаешь? Ну а про интерес это ДА . Я с двигателем играюсь а кому-то светодиодная подсветка актуальна или девчата или пиво или то и другое но без подсветки...
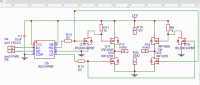
Объединил входы микросхем. Если просто запитать SD второй 5v(pin4) останетсякак у всех 2 управляющих пина реверс(Dir ) и шим(pwm).
Проверю работоспособность обоих драйверов отпишусь.
@Arhat109, У тебя наверное хороший драйвер получился но вот я почему то повелся на схему с N- канальными мосфетами. Возможно позже и твой драйвер попробую.
Возможно есть более подходящая для этого микросхема буду рад узнать какая.
или девчата или пиво или то и другое но без подсветки...Объединил входы микросхем. Если просто запитать SD второй 5v(pin4) останетсякак у всех 2 управляющих пина реверс(Dir ) и шим(pwm).
Проверю работоспособность обоих драйверов отпишусь.
@Arhat109, У тебя наверное хороший драйвер получился но вот я почему то повелся на схему с N- канальными мосфетами. Возможно позже и твой драйвер попробую.
Верно. Только у мкросхемы высокий уровень IN это HO и низкий LO (либо то либо другое ,что и есть защита от сквозняка)Глянул даташит .. какойто мутный драйвер:
not SD - это сигнал shutdown а вовсе не управление. При его низком уровне - оба выхода идут в 0, и получается что in - направление работы внутреннего выходного полумоста .. и только. Это точно "драйвер" для усиления мосфетами далее?
IR2104 — Полумостовой драйвер — DataSheet
rudatasheet.ru
Изменено:
Посмотрел даташит ещё раз.
@Эдуард Анисимов, В этой серии полно самых разных драйверов, и конкретно этот - высоковольтный, малотоковый драйвер для ВВ мосфетов с небольшими токами нагрузки 2-4ампера. Применены .. 20-амперники. В затворах которых стоит 100 ом, а им "хочется" около 10 .. впрочем, вот тема, кмк один-в-один с нашей: https://www.radiokot.ru/forum/viewtopic.php/viewtopic.php?f=11&t=163646&view=print
Как понимаю, это драйвер не для этих мосфетов и не для такого двигла.
@РыкаВладимир, у Алекса достаточно много сырых и не очень верных решений. Но, не считаю ЭТО недостатком данного форума. Скроее даже наоборот - заставляет ВДУМЧИВО применять то, что он сделал, ибо повторять надо строго 1-1, или допиливать напильником, что тут можно прочесть практически в каждой первой теме за обсуждение того или иного проекта.
Отсюда, шибко подозреваю, что драйвер "условно рабочий", в применении В ТОЧНОСТИ и повторении того, что сделано Алексом. Что ты сделал не так .. ХЗ (хотелось бы знать) - тебе видней. Почитай статью по ссылке, возможно там есть нечто полезное. Всё не читал, ибо мне - как-то не интересно.
У меня драйвер, который соответствует моим применениям и, точно также как "видосы Алекса" .. применим не везде, т.к. не имеет некоторых полезных режимов управления. И больше того, дополнительно требует аккуратного программирования.
Для управления N-канальными мосфетами, эта серия вполне подходит. Их там "дофига" самых разных. Кстати, есть такой танк с такими моторами, но вот не помню чтобы в нем было 18в, там кажется 3S стоит. Моторы там на 3-5А, явно не больше. Могу посмотреть поточней.
Вам вполне должен подойти Monster-shield из готовых драйверов. L-298 тут явно "недобор".
@Эдуард Анисимов, В этой серии полно самых разных драйверов, и конкретно этот - высоковольтный, малотоковый драйвер для ВВ мосфетов с небольшими токами нагрузки 2-4ампера. Применены .. 20-амперники. В затворах которых стоит 100 ом, а им "хочется" около 10 .. впрочем, вот тема, кмк один-в-один с нашей: https://www.radiokot.ru/forum/viewtopic.php/viewtopic.php?f=11&t=163646&view=print
Как понимаю, это драйвер не для этих мосфетов и не для такого двигла.
@РыкаВладимир, у Алекса достаточно много сырых и не очень верных решений. Но, не считаю ЭТО недостатком данного форума. Скроее даже наоборот - заставляет ВДУМЧИВО применять то, что он сделал, ибо повторять надо строго 1-1, или допиливать напильником, что тут можно прочесть практически в каждой первой теме за обсуждение того или иного проекта.
Отсюда, шибко подозреваю, что драйвер "условно рабочий", в применении В ТОЧНОСТИ и повторении того, что сделано Алексом. Что ты сделал не так .. ХЗ (хотелось бы знать) - тебе видней. Почитай статью по ссылке, возможно там есть нечто полезное. Всё не читал, ибо мне - как-то не интересно.
У меня драйвер, который соответствует моим применениям и, точно также как "видосы Алекса" .. применим не везде, т.к. не имеет некоторых полезных режимов управления. И больше того, дополнительно требует аккуратного программирования.
Для управления N-канальными мосфетами, эта серия вполне подходит. Их там "дофига" самых разных. Кстати, есть такой танк с такими моторами, но вот не помню чтобы в нем было 18в, там кажется 3S стоит. Моторы там на 3-5А, явно не больше. Могу посмотреть поточней.
Вам вполне должен подойти Monster-shield из готовых драйверов. L-298 тут явно "недобор".
Нашел у себя опечаточку((( Q1и Q3 на схеме короткозамкнуты, на живой плате естественно нет иначе погорели бы. (исправил)Полумост драйвера с бутстрепом у меня не работает, немножко переделал.
Если у кому удалось запустить драйвер https://easyeda.com/beragumbo/H_bridge__IR2104-0b08fb8b54c345a1a575cbd47833915b
Помогите мне я тоже хочу!!!!
Изменено:
Посмотрел. В моем стоит RS380 с рабочим током в 3.9А и током КЗ под 22А .. ну и он 12-и вольтовый. Под такой мотор, да лучше мосфеты N-канальные, и с предельными токами раза в 2 больше .. на 30-40А. Управление лучше посчитать конкретно по Мосфету, т.к. надо обеспечить крутые фронты, а это приличные токи драйвера и небольшое затворное сопротивление.
https://cyberleninka.ru/article/n/harakteristiki-i-osobennosti-primeneniya-drayverov-mosfet-i-igbt вот тут есть список драйверов серии IR ну и поиском.
IR2010 - 200v, 3A/3A может быть оно, но это "независимый драйвер", а не как у Вас "с одним управлением".
Я бы посчитал сначала схему в каком-нибудь "протеусе" все же.
P.S. Ну и для такого мотора уже требуются полноценные обвязки на предмет режима торможения (генераторный режим мотора), переполюсовки (выбросы противоЭДС) .. там токи будут под КЗ, а это не мало. Ну и "разводка проводов" .. на токи больше 5А уже требуется учитывать и ширину дорожек и теплопотери и омический нагрев и рост сопротивления проводников (выбор сечения). Дальше 10А уже будет играть даже "длина" провода от мотора к драйверу..
На эту тему рекомендую почитать про установку сильноточных (до 100А) драйверов для BLDC моторов разной тяжелой авионики .. там теже самые проблемы.
.. одна из причин, почему ограничил свой проект драйвера токами 5-7А..
https://cyberleninka.ru/article/n/harakteristiki-i-osobennosti-primeneniya-drayverov-mosfet-i-igbt вот тут есть список драйверов серии IR ну и поиском.
IR2010 - 200v, 3A/3A может быть оно, но это "независимый драйвер", а не как у Вас "с одним управлением".
Я бы посчитал сначала схему в каком-нибудь "протеусе" все же.
P.S. Ну и для такого мотора уже требуются полноценные обвязки на предмет режима торможения (генераторный режим мотора), переполюсовки (выбросы противоЭДС) .. там токи будут под КЗ, а это не мало. Ну и "разводка проводов" .. на токи больше 5А уже требуется учитывать и ширину дорожек и теплопотери и омический нагрев и рост сопротивления проводников (выбор сечения). Дальше 10А уже будет играть даже "длина" провода от мотора к драйверу..
На эту тему рекомендую почитать про установку сильноточных (до 100А) драйверов для BLDC моторов разной тяжелой авионики .. там теже самые проблемы.
.. одна из причин, почему ограничил свой проект драйвера токами 5-7А..
Изменено:
На макетке проверил вот эту схемку . При включении двигатель делает несколько оборотов и останавливается. Реверс работает т.е. pin1 HO/LO двигатель меняет направление.

Поделиться: