
У какого микроконтроллера больше всего пинов?
- Автор темы BlackLight
- Дата начала
@Старик Похабыч, голосовать ногами, у кого больше ног тот и победил.
Под драйвера шаговых моторов наверно.
Под драйвера шаговых моторов наверно.
Хотел сделать механического человека с возможностью тактильно ощущать предметы, хотя бы с минимальной точностью.А можно задачу под такое кол-во ног узнать ?
Понятно. кмк подход в корне не верный, но это лично мое мнение. Надо разделять задания. к примеру есть одна ардуина на которой будет висеть задача сгибать и разгибать "палец" с заданным усилием. А так же получать команды от ардуины , которая "кисть". "Кисть" управляет "пальцами" и принимает команды от "руки".
Да я уже забил, лень заниматься этим. Главной целью проекта было сделать именно тактильный сенсор, я накалякал несколько чертежей, но эта затея заведомо провальна.Понятно. кмк подход в корне не верный, но это лично мое мнение. Надо разделять задания. к примеру есть одна ардуина на которой будет висеть задача сгибать и разгибать "палец" с заданным усилием. А так же получать команды от ардуины , которая "кисть". "Кисть" управляет "пальцами" и принимает команды от "руки".
) я ничего не шарю особо пока чтоУ сдвиговых регистров по spi - десятки МГц, зачем юзать родные ноги то?)
@AlexGyver, далеко не всегда полезно управление чем-то, по последовуательным протоколам, хотя и на десятках мегагерц. В системах управления частенько требуется "нога", дабы тупо включать выключать условное реле или ШИМ для ещё одного серводвигателя.
Как пример: имитатор кисти руки .. сколько степеней свободы? А за кистью идет локоть, плечо .. и рук в целом две, а роботу можно сделать и побольше .. четыре к примеру (Этта: брать, хватать, держат и .. бдить!") ).
).
Можно конечно повесить на каждую пару серв, линейных двигателей (реле) по своей НАНО, но .. зачем, когда скорости управления вполне достаточно для одного МК?
В целом, вопрос, кмк, больше холиварный, т.к. в разных применениях полезно и то и другое.
Как пример: имитатор кисти руки .. сколько степеней свободы? А за кистью идет локоть, плечо .. и рук в целом две, а роботу можно сделать и побольше .. четыре к примеру (Этта: брать, хватать, держат и .. бдить!
).Можно конечно повесить на каждую пару серв, линейных двигателей (реле) по своей НАНО, но .. зачем, когда скорости управления вполне достаточно для одного МК?
В целом, вопрос, кмк, больше холиварный, т.к. в разных применениях полезно и то и другое.
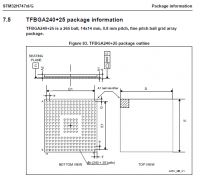
STN32H747 в TFBGA240+25корпусе на 265 шариков пойдет?
А вот STM32MP157D в LFBGA448 на 448 шариков - это уже классифицируется как микропроцессор.
Вообще, паябельные LFQP корпуса есть до 208 ног, например STM32F746BGT
А вот STM32MP157D в LFBGA448 на 448 шариков - это уже классифицируется как микропроцессор.
Вообще, паябельные LFQP корпуса есть до 208 ног, например STM32F746BGT
Вложения
-
 42.9 KB Просмотры: 11
42.9 KB Просмотры: 11
Поделиться: