Всем привет!
Я использую обычный щеточный мотор 12В, 3-4А.

Хочу купить к нему приличный драйвер, но пока как временный вариант использую модуль L298N.

Мне по сути нужно менять полярность и управлять скоростью при помощи ШИМ сигнала. Тестировал на маленьких моторчиках - всё норм работает. Хочу подключить нормальный, но есть вопрос.
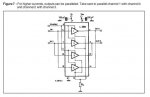
У L298N заявлено, что можно подключать на 1 канал до 2х Ампер, но натыкался на информацию, что можно соединить параллельно выходные каналы на двигатели и получать до 4х Амппер, что мне собственно говоря пока и нужно. Вопрос в том, как при такой схеме подключать Ардуину к управляющим пинам (их тоже все параллелить или нет)?
Я использую обычный щеточный мотор 12В, 3-4А.
Хочу купить к нему приличный драйвер, но пока как временный вариант использую модуль L298N.
Мне по сути нужно менять полярность и управлять скоростью при помощи ШИМ сигнала. Тестировал на маленьких моторчиках - всё норм работает. Хочу подключить нормальный, но есть вопрос.
У L298N заявлено, что можно подключать на 1 канал до 2х Ампер, но натыкался на информацию, что можно соединить параллельно выходные каналы на двигатели и получать до 4х Амппер, что мне собственно говоря пока и нужно. Вопрос в том, как при такой схеме подключать Ардуину к управляющим пинам (их тоже все параллелить или нет)?
Изменено: