Всем привет. Собираю гексапода и столкнулся с такой бедой. Положение ноги в горизонтальной плоскости контролируется энкодером абсолютного положения.
Ссылку давать на него не буду, ибо местные модераторы тут же трут тему заявляя, что я выкладываю рефералки =\.
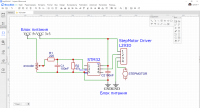
В общем энкодер питается от 5в и выдаёт напряжение на АЦП от 0 до 5в в зависимости от положения вала. Беда в том что когда я врубаю все моторы и мозги напряжение проседает, и колеблется в зависимости от интенсивности работы моторов и мозгов.
Подскажите чем можно стабилизировать напряжение на уровне 5в чтобы оно не скакало.
под рукой есть lm2596, ams1117 5v, l7805cv 5v или надо что-то совсем другое?
Ссылку давать на него не буду, ибо местные модераторы тут же трут тему заявляя, что я выкладываю рефералки =\.
В общем энкодер питается от 5в и выдаёт напряжение на АЦП от 0 до 5в в зависимости от положения вала. Беда в том что когда я врубаю все моторы и мозги напряжение проседает, и колеблется в зависимости от интенсивности работы моторов и мозгов.
Подскажите чем можно стабилизировать напряжение на уровне 5в чтобы оно не скакало.
под рукой есть lm2596, ams1117 5v, l7805cv 5v или надо что-то совсем другое?