Эта тема для обсуждения проекта Der Наливатор, созданного на основе прошивки от Alex Gyver - GyverDrink.
С начала устранения пары багов до сегодняшнего момента, прошивка раздулась и обзавелась дополнительным функционалом. Из ключевых особенностей в сравнении с оригинальной версией:
Ссылка на первоисточник
Обязательно к прочтению
Настройка
В прошивке есть конфигурационный файл Config.h,(нажмите, чтобы ознакомиться) в котором производятся все натройки устройства, такие как тип дисплея (олед или семисегментный), тип привода (шаговик или серво), количество рюмок, назначение пинов и многих других. Назначение каждого параметра описанно в комментарии к нему. По умолчанию прошивка без изменений полностью совместима с оригинальным проектом Наливатора от Alex Gyver.
На версии с OLED дисплеем в файле Config.h достаточно выбрать тип дисплея и настроить первые 6 параметров (в секции основные настройки). Все остальные настройки устройства можно провести через меню дисплея. Для того, чтобы параметры из Config.h вступили в силу, нужно сбросить настройки в сервисном меню, либо удержанием основной кнопки в течении 5секунд до появления надписи "Сброс настроек"
Актуальная прошивка доступна для скачивания в GitHub репозитории
С начала устранения пары багов до сегодняшнего момента, прошивка раздулась и обзавелась дополнительным функционалом. Из ключевых особенностей в сравнении с оригинальной версией:
- Поддержка нескольких типов графических OLED дисплеев с диагоналями 0.96", 1.3", 1.54", 2.42" на контроллерах SSD1306, SSD1309, SH1106.
- Поддержка (не замена!) шагового двигателя вместо сервопривода для более плавных и бесшумных движений на любой диапазон углов (от 0 до 360 градусов).
- Автономность засчёт питания устройства от аккумулятора с мониторингом напряжения и заряда.
- Возможность установки разного объёма жидкости для каждой рюмки отдельно.
- Дополнительный статус-светодиод, сигнализирующий об актуальном режиме/статусе.
- Ведение статистики
- Все необходимые библиотеки для работы устройства "вшиты" в проект, ничего дополнительного искать и устанавливать не требуется.
| Название | Корпус | Производитель | UGS(th)/V | UDS / V | ID / A | P / W | RDS,on / mΩ | Примечание | Цена / € |
| IRLML6244 | SOT-23 | IRF | 0,5-1,1 | 20 | 6,3 | 1,3 | 21 | 0,13 | |
| SI2302DS | SOT-23 | Vishay | 0,65-4,5 | 20 | 6 | 1,25 | 70 | 2,5V LL, очень дёшево | 0,01 |
| IRFP4310Z | TO-247AC | irf | 2,0-4,0 | 100 | 120 | 280 | 4,8 | 1,80 | |
| IRFP450 | TO-247 | irf | 2,0-4,0 | 500 | 14 | 190 | 400 | 1,20 | |
| IRF530 | TO-220 | irf | 2,9 | 100 | 16 | 94 | 160 | LIN | 0,44 |
| IRL3103 | TO-220AB | irf | 1,0 | 30 | 64 | 94 | 12 | 4,5V LL, Qg=33nC (!) | 0,95 |
| IRF730A | TO-220AB | irf | 2,0-4,5 | 400 | 5,5 | 74 | 1000 | Qg=22nC (!) | 0,54 |
| IRFP064 | TO-247AC | irf | 2,0 | 60 | 70 | 300 | 9 | Qg=190 nC | 1,65 |
| IRF3205 | TO-220AB | irf | 2,0 | 55 | 110 | 200 | 8 | 0,69 | |
| IRL3803 | TO-220AB | irf | 1,0 | 30 | 140 | 200 | 6 | 4,5V LL, Qg=140nC | 0,96 |
| IRF540 | TO-220AB | irf | 3 | 100 | 28 | 150 | 77 | LIN | 0,52 |
| IRF7401 | SO-8 | irf | 2,7 | 20 | 8,7 | 2,0 | 22 | 2,7V LL | 0,45 |
| IRF7403 | SO-8 | irf | 4,85 | 30 | 8,5 | 2,5 | 22 | 4,5V LL | 0,42 |
| IRF7413 | SO-8 | irf | 3,0 | 30 | 13,0 | 2,5 | 11 | 4,5V LL | 0,41 |
| BUZ11 | TO-220 | ST | 4,0 | 50 | 33,0 | 90,0 | 30 | LIN | 0,50 |
| BSS83 | SOT143 | NXP | 2,0 | 10 | 0,05 | 0,23 | 45000 | не путать с BSS83P | 0,10 |
| BS170 | TO-92 | gs | 2,0 | 60 | 0,3 | 0,83 | 5000 | LIN | 0,13 |
| BSN20 | SOT-23 | gs | 1,8 | 50 | 0,18 | 0,35 | 6000 | 4,5V LL, LIN | 0,092 |
| BSS138 | SOT-23 | div | 0,8-1,6 | 50 | 0,22 | 0,36 | 2000 | 5V LL, LIN | 0,06 |
| BSS123 | SOT-23 | div | 0,8-1,6 | 100 | 0,17 | 0,36 | 10000 @ 4,5V, | 4,5V LL, LIN | 0,06 |
| IRFP2907 | TO-247AC | irf | 4,0 | 75 | 209 | 470 | 4,5 | 2,70 | |
| 2N7000 | TO-92 | ON | 3,0 | 60 | 0,2 | 0,35 | 5000 | 4,5V LL, LIN | 0,13 |
| BS107 | TO-92 | ON, Phi | 3,0 | 200 | 0,25 | 0,35 | 6400/14000 | 2,6V LL; LIN | 0,18 |
| BS108 | TO-92 | ON, Phi | 2,0 | 200 | 0,25 | 0,35 | 8000 | 2V LL; LIN | 0,14 |
| BUK100 | TO-220 | Phi | 3,0 | 50 | 13,5 | 40 | 125 | Защита от перегрузки и ESD | 1,40 |
| IRL3705N | TO-220AB | irf | 2,0 | 55 | 89 | 170 | 10 | 4V LL, Qg=98nC | 1,20 |
| BUZ72A | TO-220 | Infineon | 4,0 | 100 | 9,0 | 40 | 250 | 5V LL, LIN | 0,45 |
| IRLZ34N | TO-220 | irf | 2,5 | 55 | 30 | 68 | 35 | 4V LL, LIN | 0,39 |
| IRLZ44N | TO-220 | irf | 2 | 55 | 47 | 110 | 22 | 4V LL, LIN | 0,49 |
| IRLML2502 | SOT-23 | irf | 1,2 | 20 | 4,2 | 1 | 45 | 2,5V LL | 0,17 |
| IRF1404 | TO-220AB | irf | 4,0 | 40 | 202 | 333 | 4 | - | 1,10 |
| IRL1004 | TO-220 | irf | 2,7 | 40 | 130 | 200 | 6,5 | - | 1,25 |
| IRL530 | TO220, D2Pack | irf | 2 | 100 | 15,0 | 88 | 160 | 0,57 | |
| IRF830 | TO220AB | irf | 2,0-4,5 | 500 | 5,0 | 74 | 1400 | LIN | 0,57 |
| IRF840 | TO220AB | irf | 2,0-4,0 | 500 | 8,0 | 125 | 850 | 0,57 | |
| FDC645N | SuperSOT-6 | Fairchild | 1,5 | 30 | 5,5 | 0,8/1,6 | 30 | - | 0,7 |
| BSP297 | SOT-223 | Siemens/Infineon | 0,8-2,4 | 200 | 0,65 | 1,8 | 6000 | 200V UDS, SMD и 4,5VLL, LIN (редкая комбинация) | 0,56 |
| IRF7455 | SO-8 | irf | 4,5 | 30 | 15 | 2,5 | 7,5 | 1,04 | |
| SI4442DY | SO-8 | vis | 2,5 | 30 | 22 | 2,5 | 5/4,5V | 1,64 | |
| IRLU2905 | TO251, DPack | irf | 2,0 | 55 | 42 | 110 | 27 | 4V LL | 0,54 |
| IRFD014 | HEXDIP/DIP4 | irf | 2,0-4,0 | 60 | 1,7 | 1,3 | 200 | 0,52 | |
| IRFD024 | HEXDIP/DIP4 | irf | 2,0-4,0 | 60 | 2,5 | 1,3 | 100 | 0,54 | |
| IRLD024 | HEXDIP/DIP4 | irf | 1,0-2,0 | 60 | 2,5 | 1,3 | 100 | 4V LL | 0,47 |
| IRLU3717 | I-Pak | irf | 2,0 | 20 | 120 | 1,5/89 | 4 | 4,5V LL, Qg=21nC, | 1,15 |
| IRFP3703 | TO-247AC | irf | 4,0 | 30 | 210 | 230 | 2,8 | 5,08 | |
| IRF3710 | TO-220AB | irf | 4 | 100 | 57 | 200 | 23 | 0,83 | |
| IRLR7843 | D-Pack | irf | 2,3 | 30 | 164 | 140 | 3,3 | 4,5V LL, Qg: 34nC | 0,70 |
| IRF1010N | TO-220AB | irf | 4 | 55 | 85 | 180 | 11 | 1,99 | |
| IRF1010Z | TO-220AB | irf | 4 | 55 | 75 | 140 | 7,5 | 1,99 | |
| IRLIZ44N | TO-220-Fullpak | irf | 1,0 - 2,0 | 55 | 30 | 45 | 25 | 4V LL | 0,80 |
| IRLU024N | TO-251AA | irf | 1,0 - 2,0 | 55 | 17 | 45 | 80 | 4V LL, Qg=15 nC (!) | 0,40 |
| IRFZ48N | TO-220AB | irf | 3 | 55 | 64 | 130 | 14 | 0,60 | |
| IRL2505 | TO-220AB | irf | 2,5 | 55 | 104 | 8 | 4V LL | 3,99 | |
| IRF7607 | Micro8 | irf | 1,2 | 20 | 6,5 | 1,8 | 30 | 2,5V LL | 1,89 |
| IRF3708 | TO-220AB | irf | 0,6 - 2 | 30 | 62 | 87 | 8 | 2,8V LL | 0,69 |
| GF2304 | SOT-23 | gs | 1,0 | 30 | 2,5 | 1,25 | 135 | Qg=3,7nC | 0,05 |
| IRLR8743 | I-Pak, D2Pack | IRF | 1,9 | 30 | 50 | 68 | 3,1 | 4,5V LL, Qg=39nC | 1,15 |
| AOC2414 | MCSP | Alpha&Omega | 0,52 | 8 | 4,5 | 0,55 | 19 | 1,2V LL, Qg=21,5nC |
- Прокачка. Поставьте рюмку, нажмите и удерживайте кнопку энкодера.
Прокачка проводится только в ручном режиме и только при наличии рюмки.
Возврат крана в домашнее положение и сброс счётчика объёма жидкости происходит после снятия рюмки. - Режим изменяется удержанием основной кнопки в течении полусекунды.
Ручной режим: разлив начинается только после однократного нажатия на основную кнопку.
Авто режим: разлив начинается автоматически сразу после установки рюмки. - Целевой объём изменяется вращением энкодера. При одновременном нажатии и вращении энкодера, объём изменяется на 10 единиц, без нажатия на 1 единицу
- Возможность настроить объём для каждой рюмки отдельно:
Функция активна только если количество поставленных рюмок > 1
При однократном нажатии на энкодер подсвечивается место рюмки, объём которой изменяется вращением энкодера. При повторном нажатии подсвечивается следующая установленная рюмка.
Если же ни одна рюмка не подсвечивается белым, вращение энкодера изменяет объём для всех рюмок одновременно (как в обычном ручном режиме). - Разлив можно остановить в любое время нажатием на основную кнопку.
- Последний выбранный объём сохраняется сразу после налива первой рюмки.
- Дополнительный статус-светодиод подключается к светодиоду последней рюмки, активируется в STATUS_LED. Служит для индикации режимов работы.
- Индикация заряда аккумулятора и слежение за напряжением.
Активируется раскоментированием строки #define BATTERY_PIN ...
При напряжении, меньшем чем BATTERY_LOW (по умолчанию 3.3В), устройство перестаёт реагировать на внешние воздействия и на дисплее мигает иконка батареи.
Если при первом включении мигает иконка аккумулятора, но напряжение в порядке(больше, чем BATTERY_LOW) -> нажмите и удерживайте кнопку до появления меню калибровки аккумулятора.
Для отслеживания статуса зарядки, IN+ с модуля заряда TP4056 нужно подключить к пину A6. При зарядке появится анимация заряда акб. - Стартовая анимация и динамическая подсветка рюмок во время и после налива.
Сервис режим:
Вход в сервис режим осуществляется удержанием основной кнопки выбора режима во время стартовой анимации до появления на дисплее надписи "SerViCE". После отпускания кнопки на дисплее появится номер этапа калибровки:
Вход в сервис режим осуществляется удержанием основной кнопки выбора режима во время стартовой анимации до появления на дисплее надписи "SerViCE". После отпускания кнопки на дисплее появится номер этапа калибровки:
- - 1 - На этом этапе производится настройка положений сервопривода над рюмками.
- Уберите все рюмки. На дисплее отобразится положение парковочной позиции в градусах. При этом по краям дисплея будут отображенны штрихи (при градусе > 99, штрих только с правой стороны).
- Вращением энкодера измените положение парковочной позиции
- Поставьте рюмку. На дисплее отобразится номер рюмки и позиция в градусах. Вращением энкодера подстройте положение точно над рюмкой. Уберите рюмку.
- Повторите предыдущий пункт для всех остальных рюмок.
- После настройки позиций для всех рюмок нажмите основную кнопку изменения режима пока на дисплее не появится номер следующего этапа калибровки.
- - 2 - На этом этапе производится калибровка таймера для налития 50мл.
- Поставьте рюмку в любое положение. Кран встанет над этой рюмкой.
- Нажатием на кнопку энкодера включится помпа. Удерживайте до тех пор, пока не польётся жидкость.
- Снимите рюмку и поставьте пустую в любое положение.
- Удерживайте кнопку энкодера, пока не нальётся ровно 50мл.
- Снимите рюмку. Нажмите основную кнопку изменения режима. Если мониторинг АКБ активен, на дисплее отобразится следующий номер этапа калибровки. В обратном случае калибровка оконченна. На дисплее отобразится основной объём.
- - 3 - На этом этапе производится калибровка напряжения аккумулятора.
- На дисплее отобразится напряжение аккумулятора в [mV].
- Вращением энкодера подстройте отображаемое напряжение до измеренного вольтметром.
- Нажмите основную кнопку изменения режима. Калибровка оконченна. На дисплее отобразится основной объём.
- При зажатии кнопки выбора режима более 5 секунд, происходит сброс настроек из памяти (TIME_50ML, SHOT_POSITIONS, PARKING_POS и BATTERY_CAL) до первоначальных, прописанных в Config.h
- Наличие полноценного, графического меню. Вход/Выход зажатием основной кнопки более полусекунды. Выход из подменю в основное однократным нажатием.
- Калибровка объёма за единицу времени, калибровка углов сервопривода для рюмок и калибровка напряжения аккумулятора осуществляется в сервисном меню. Вход в сервисное меню осуществляется зажатием основной кнопки во время стартовой анимации.
- Возможность изменять настройки прошивки прямо в меню. Для этого нажмите на кнопку энкодера на параметре и вращением измените его значение.
- Ведение статистики. Количество налитых рюмок, объём за сеанс (до выключения устройства) и общий объём, сохраняемый в памяти. При нажатии на кнопку энкодера, выбранное значение сбрасывается
Обязательно к прочтению
Очень часто проблемы возникают из-за некачественной пайки и остатков флюса на компонентах. Обязательно после пайки, до подачи питания, тщательно прочистить все места пайки спиртосодержащим средством и щёткой!
- Зачастую проблемы с серводвигателем возникают из-за плохого качества самого привода. Дешёвые серво (хоть и цена это не первостепенный показатель качества, но всё же дешевле 6-7$ за серво микро размера брать не советую). Обратите внимание на фирму-производителя. На приводе должен быть лейбл с граматически правильным написанием фирмы (Например оригинальное название фирмы Tower Pro, не TowerPro и не Towerpro). Для данного проекта (и не только) рекомендую привод EMAX ES08MD II
- Сенсоры TTP229 не стоит тестировать просто лежащими на столе и не зафиксированными (или приклееными абы как на коленку). Эти датчики, в отличии от обычных механических выключателей, очень капризные к окружающей среде и требуют особого подхода. При подаче питания, они анализируют ёмкость между входом (пластиной, площадкой) и окружающей её средой. Измеренная ёмкость является референсной (с которой будут сравниваться последующие изменения ёмкости) до отключения питания. Поэтому во время подачи питания не следует ставить вблизи сенсора какие-либо предметы. Если оставить рюмку на сенсоре до включения, то для того, чтобы сенсор среагировал, нужно уже будет поднести к нему что-то большего размера (например руку или большой стакан), так как срабатывание датчика происходит если измеренная ёмкость окружающей среды больше референсной. При фиксации в корпусе референсная ёмкость будет достаточно большой, чтобы не реагировать на каждую пылинку, пролетающую мимо, а только на предметы, находящиеся вблизи, ведь ёмкость зависит не только от площади (размеров) детектируемого предмета, но и от расстояния до него - чем ближе, тем больше. Следовательно, если датчик плохо реагирует на рюмку/стакан (сбрасывается или не реагирует вообще, однако на палец без проблем) то стоит либо уменьшить расстояние от рюмки до пластины сенсора, либо увеличить площадь самой пластины. Так же держите сигнальные и силовые провода подальше от площадок сенсоров либо экранируйте их во избежание помех.
- Если планируется делать устройство на макс. 4 рюмки, то TTP224 Ваш выбор. К тому же, некоторые наливаторостроители говорят, что этот модуль менее капризен, чем TTP229.
- Повышающий преобразователь. По результатам теста тут, модуль DD03AJTA предпочтительнее чем народный MT3608
- При любой непонятной ситуации или странном поведении устройства рекомендуется сначала произвести сброс настроек (очистка EEPROM) в сервисном меню или любым другим способом.
- Зависает или совсем не работает OLED дисплей? Добавьте подтягивающие резисторы (4.7к) на линии i2c. То есть один между VCC и A4, второй между VCC и A5. Если не работает с двумя резисторами, попробуйте оставить один только на A4 (sda).
- Ошибка компиляции:
#error "Not ATmega328P board!". На данный момент поддерживаются только платы на ATmega328P (Uno, Nano, Mini). - Параметры из Config.h не учитываются после прошивки - чтобы эти параметры вступили в силу - сбростьте настройки по умолчанию (коими и являются все из Config.h) в сервисном меню (вход зажатием основной кнопки до окончания стартовой анимации), либо удержанием основной кнопки в течении 5секунд до появления надписи "Сброс настроек" в любом рабочем режиме.
- Серводвигатель постоянно вращается без остановки - это сервопривод постоянного вращения (без обратной связи по положению). Для данного проекта не подойдёт. Нужен такой, который имеет определённый диапазон установки положения (обычно 120 - 180 градусов).
- Серводвигатель постоянно дёргается, моргает дисплей и/или светодиоды - Причин может быть много, но в большинстве случаев это проблемы с питанием (нехватка мощности, помехи, неисправный преобразователь напряжения(повышайка)). Рекомендую установить аккумулятор (18650 Li-Ion например, можно несколько штук параллельно для увеличения ёмкости). Желательно новый, не стоит на этом экономить.
- Иногда дёргается сервопривод. В прошивке встроена дополнительная библиотека Adafruit TicoServo для управления серводвогателем. В некоторых случаях сервопривод работает с ней стабильнее. Для использования этой библиотеки нужно:
- Поменять местами провода на пинах D5 и D10
- В файле
Config.hтак же поменять эти пины:#define SERVO_PIN 10и#define ENC_CLK 5 - В файле GyverDrink_VICLER_MOD раскомментировать строку
#define USE_TICOSERVO
- Серводвигатель не поворачивается на 180 градусов. Увы и ах, не все сервоприводы способны поворачиваться на 180 градусов. Тут либо замена на другой, проверенный привод (читать предыдущий спойлер), либо конструкция устройства под имеющийся.
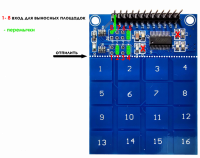
- Как подключить TTP224/TTP229 к Arduino? На модулях TTP есть ножки, обозначенные как выходы (OUT1, OUT2 и т.д). Вот их и подключаем к пинам A0, A1, A2... (
#define SW_PINSв Config.h). - Светодиоды не реагируют при срабатывании датчиков (все, либо после какого-то определённого светодиода). Если неисправен один светодиод в цепи, то все последующие (подключенные после него) работать не будут.
- На краю OLED дисплея полоса на всю высоту из хаотично расставленных пикселей? Смените контроллер дисплея с SSD1306 на SH1106 или наоборот.
- Проблемы с контроллером LGT8F328p (например китайский клон WavGat) ? Инструкция от @Fedor73
В прошивке есть конфигурационный файл Config.h,(нажмите, чтобы ознакомиться) в котором производятся все натройки устройства, такие как тип дисплея (олед или семисегментный), тип привода (шаговик или серво), количество рюмок, назначение пинов и многих других. Назначение каждого параметра описанно в комментарии к нему. По умолчанию прошивка без изменений полностью совместима с оригинальным проектом Наливатора от Alex Gyver.
На версии с OLED дисплеем в файле Config.h достаточно выбрать тип дисплея и настроить первые 6 параметров (в секции основные настройки). Все остальные настройки устройства можно провести через меню дисплея. Для того, чтобы параметры из Config.h вступили в силу, нужно сбросить настройки в сервисном меню, либо удержанием основной кнопки в течении 5секунд до появления надписи "Сброс настроек"
Актуальная прошивка доступна для скачивания в GitHub репозитории
Изменено: