Есть задача сделать нагреватель, который должен греться до 30 градусов (с возможностью регулирования). Он в свою очередь нагревает воздух до 25 градусов (с возможностью регулирования).
Нагреватель работает через твердотельное реле использую PID и Шим.
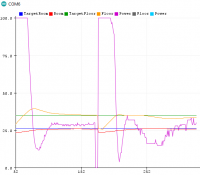
В системе имеется 2 температурных датчика, которые меряют воздух и нагреватель соответственно.
При достижении температуры воздуха заданной температуры, допустимо снижение температуры нагревателя.
Наверняка это тривиальная задача, но прямого ответа у себя в мозгах я не нашёл.
Нагреватель работает через твердотельное реле использую PID и Шим.
В системе имеется 2 температурных датчика, которые меряют воздух и нагреватель соответственно.
При достижении температуры воздуха заданной температуры, допустимо снижение температуры нагревателя.
Наверняка это тривиальная задача, но прямого ответа у себя в мозгах я не нашёл.