Всем доброго времени суток!
Нужна помощь в осущетвлении идеи.
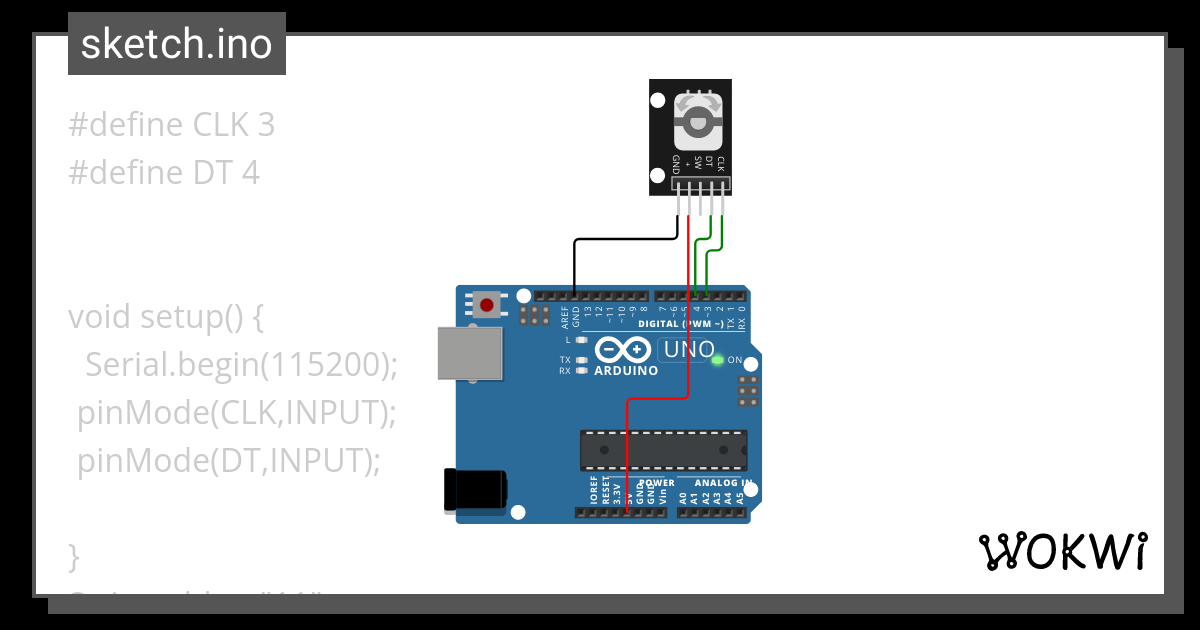
Есть энкодер 3 пина. Нужно снять сигналы поворота колеса на верх и вниз два разных сигнала, то есть провода которые будут подавать сигнал дальше.
Подскажите какой микроконтроллер(максимально компактный и недорогой) лучше взять где не будет проблем со снятием сигнала на 2 разных провода.
Также возможно у кого-то есть какой-то готовый код для загрузки в микрокотроллер, так как все коды которые видел работают именно посредством одного контакта где определяется в какую сторону крутиться колесо.
Заранее спасибо.
Нужна помощь в осущетвлении идеи.
Есть энкодер 3 пина. Нужно снять сигналы поворота колеса на верх и вниз два разных сигнала, то есть провода которые будут подавать сигнал дальше.
Подскажите какой микроконтроллер(максимально компактный и недорогой) лучше взять где не будет проблем со снятием сигнала на 2 разных провода.
Также возможно у кого-то есть какой-то готовый код для загрузки в микрокотроллер, так как все коды которые видел работают именно посредством одного контакта где определяется в какую сторону крутиться колесо.
Заранее спасибо.
Вложения
-
 105.1 KB Просмотры: 10
105.1 KB Просмотры: 10