Заголовок темы должен отражать содержимое. Исправь или тема будет удалена
Тему про типичные ошибки читал.
пытаюсь состыковать энкодер с шаговым мотором использую билбиотеки Encbutton и GyverStepper2 ( включая Stepper Core)
программа ругается на строку кода взятую из документации библиотеки
гугл что ошибка в синтаксисе, но откуда тут ошибка если я целиком строку из примера взял
пытаюсь состыковать энкодер с шаговым мотором использую билбиотеки Encbutton и GyverStepper2 ( включая Stepper Core)
программа ругается на строку кода взятую из документации библиотеки
C++:
C:\Users\r\Documents\Arduino\stepper\stepper.ino: In function 'void loop()':
stepper:35:34: error: expected primary-expression before 'ntar'
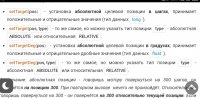
stepper.setTargetDeg(int32_t ntar, GS_posType type = ABSOLUTE); // поворот направо
^~~~
stepper:35:51: error: expected primary-expression before 'type'
stepper.setTargetDeg(int32_t ntar, GS_posType type = ABSOLUTE); // поворот направо
^~~~