
Добрый день. Просьба тапками не закидывать, это мой первый проект, поэтому часть работы выполнена по принципу, это работало в найденном мной примере, берем от туда. Так что понимаю, что местами будет помесь ежа с носорогом.
Задача: создать систему спасения на ракете с твердотопливным двигателем, а за одно и вести лог полета.
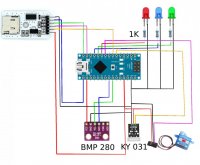
Идея реализации: На основе датчика bmp 280 мерим давление, показания пишем в лог. Когда давление начинает нарастать, подаем сигнал на сервопривод, который высвобождает парашют.
ПРОБЛЕМА: при подключение ардуино к компьютеру скетч работает безупречно, все выполняется как задумал. При запитывании ардуино другим способом - работа останавливается. Причем не важно как, на 5В, на VIN (7В-12В), через USB порт от сети - не работает и все тут.
Задача: создать систему спасения на ракете с твердотопливным двигателем, а за одно и вести лог полета.
Идея реализации: На основе датчика bmp 280 мерим давление, показания пишем в лог. Когда давление начинает нарастать, подаем сигнал на сервопривод, который высвобождает парашют.
ПРОБЛЕМА: при подключение ардуино к компьютеру скетч работает безупречно, все выполняется как задумал. При запитывании ардуино другим способом - работа останавливается. Причем не важно как, на 5В, на VIN (7В-12В), через USB порт от сети - не работает и все тут.
C++:
#include <Wire.h>
#include <Adafruit_BMP280.h> // библиотека датчика давления
#include <Servo.h> // библиотека сервопривода
#include "SPI.h" // библиотека карты памяти
#include "SD.h" // библиотека карты памяти
File myFile;
Servo servoOne;
Adafruit_BMP280 bmp; // Создание объекта датчика давления
#define SEALEVELPRESSURE_HPA (1021.63) // Текущее давление на уровне моря в гПа (hPa). Нужно настроить под вашу локальную погоду для точных данных
// НАЗНАЧЕНИЕ ПИНОВ И ПЕРЕМЕННЫХ//
int shake; // переменная для хранения значения датчика наклона
int start = 0; // переменная для хранения точки старта с датчика наклона
int fall = 0; // переменная для хранения точки выпуска парашута
int terra = 0; // переменная для хранения точки приземления
float startAlt = 0; // переменная высоты старта
float maxAlt = 0; // переменная максимальной высоты
float curAlt; // переменная текущей высоты
int tiltSensorPin = 3; // назначение пина для датчика наклона
const int ServoOnePin = 6; // назначение пина сервопривода
const int chipSelect = 4; // Указываем к какому выводу подключен CS карты памяти
#define RED_PIN 7 // Красный светодиод на 7 пине
#define BLUE_PIN 9 // Синий светодиод на 9 пине
#define GREEN_PIN 8 // Зеленый светодиод на 8 пине
void setup(){
pinMode(RED_PIN, OUTPUT);
pinMode(BLUE_PIN, OUTPUT);
pinMode(GREEN_PIN, OUTPUT);
pinMode(ServoOnePin, OUTPUT);
servoOne.attach(ServoOnePin);
if (!SD.begin()) // если карта не завелась
{
digitalWrite(RED_PIN, HIGH); // включаем красный светодиод
return;
}
else
{
digitalWrite(RED_PIN, HIGH); // включаем красный светодиод
delay(2000); // ждем 2 секунды
digitalWrite(RED_PIN, LOW); // выключаем красный светодиод
}
if (!bmp.begin(0x76)){ // если датчик давления не завелся
digitalWrite(BLUE_PIN, HIGH); // включаем синий светодиод
return;
}
else
{
bmp.setSampling(Adafruit_BMP280::MODE_NORMAL, /* нормальный режим. */
Adafruit_BMP280::SAMPLING_X2, /* опрос температуры */
Adafruit_BMP280::SAMPLING_X16, /* опрос давления */
Adafruit_BMP280::FILTER_X16, /* Фильтрация */
Adafruit_BMP280::STANDBY_MS_63 /* Таймаут сна */
);
digitalWrite(BLUE_PIN, HIGH); // включаем синий светодиод
delay(2000); // ждем 2 секунды
digitalWrite(BLUE_PIN, LOW); // выключаем синий светодиод
}
}
void loop(){
shake = digitalRead (tiltSensorPin); // чтение состояния датчика наклона если выявлено сотрясение, ракета была запущена
if (shake > start) start = shake; // обновляем значение обнаружено сотрясение
curAlt = bmp.readAltitude(1013.25); // получаем текущую высоту
if (start == 1 && startAlt == 0){
startAlt = curAlt; // запоминаем высоту старта
maxAlt = curAlt; // задаем максимальную высоту
digitalWrite(GREEN_PIN, HIGH); // включаем зеленый светодиод
for(int i=0;terra==0;i++){ // цикл, для записи показаний - до момента пока ракета не совершит посадку (приблизится к стартовой высоте)
curAlt = bmp.readAltitude(1021.63); // получаем текущую высоту
if (maxAlt < curAlt) maxAlt = curAlt; // обновляем значение максимальной высоты
myFile = SD.open("log.txt", FILE_WRITE); // Открытие файла, одновременно может быть открыт только один файл
if (myFile){
myFile.println(i);
myFile.print(F("Температура: "));
myFile.print(bmp.readTemperature());
myFile.println(F(" *C"));
myFile.print(F("Давление: "));
myFile.print(bmp.readPressure() / 100.0F); // Па в гПа
myFile.println(F(" hPa"));
myFile.print(F("Высота: "));
myFile.print(bmp.readAltitude(SEALEVELPRESSURE_HPA));
myFile.println(F(" m"));
myFile.close(); // Закрываем файла
// ВЫБРОС ПАРАШУТА //
if ((maxAlt-curAlt)>=10 && fall==0){ // если максимальная высота больше текущей + 10 и парашут не выпущен
servoOne.write(0);
servoOne.write(180); // поворачиваем сервопривод
fall = start; // парашют выпущен (больше сервопривод работать не будет)
// КОНЕЦ ЗАПИСИ - ПОСАДКА //
if (curAlt<=startAlt+10 && maxAlt>=curAlt+10){ // если текущая высота меньше или равна стартовой + 10 и максимальная больше текущей
digitalWrite(BLUE_PIN, HIGH); // зажигаем синий светодиод
myFile = SD.open("end.txt", FILE_WRITE); // Открытие файла, одновременно может быть открыт только один файл
if (myFile) {
myFile.print(F("Максимальная высота: "));
myFile.print(maxAlt);
myFile.println(F(" m"));
myFile.print(F("Стартовая высота: "));
myFile.print(startAlt);
myFile.println(F(" m"));
myFile.print(F("Высота подъема: "));
myFile.print(maxAlt - startAlt);
myFile.println(F(" m"));
myFile.close();
terra = start; //присваиваем переменной, не нулевое значение, завершаем цикл for
}
}
}
else;
delay(100); // Пауза
}
}
else{
return;
}
}Вложения
-
 83.3 KB Просмотры: 7
83.3 KB Просмотры: 7
Изменено: