
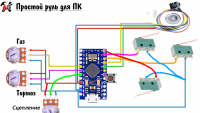
Сделал все по такой схеме, дописал все, что мне нужно в код.
@s60team, выше указанный код выдает ошибку компиляции:"
C:\Program Files (x86)\Arduino\libraries\Rotary2-main\Rotary2.cpp:16:10: fatal error: Rotary.h: No such file or directory
#include "Rotary.h"
^~~~~~~~~~
compilation terminated.
exit status 1
Ошибка компиляции для платы Arduino Micro."
в этом коде ничего не менял, библиотеки скачал по ссылкам из кода.
Все таки интересно, почему работают только 3 оси, плюс ось Y чуть-чуть двигается, при нажатии педали сцепления.
Мой дописанный код:
// =========== НАСТРОЙКИ ===========
#define DEBUG 0 // режим отладки
#define ENC_TYPE 1 // тип энкодера, 0 или 1
#define INV_WHEEL 0 // инверсия руля
// пины
#define ENC_A 5 // пин энкодера
#define ENC_B 6 // пин энкодера
#define POT_THR A0 // педаль газа
#define POT_BR A1 // педаль тормоза
#define POT_CL A2 // педаль сцепления
#define BUTT_BR 9 // кнопка ручника
#define BUTT_UP 7 // кнопка повышения передачи
#define BUTT_DW 8 // кнопка понижения передачи
#define BUTT_CAL 3 // кнопка калибровки
volatile int encCounter = 0;
volatile boolean state0, lastState, turnFlag;
int throttleMin, throttleMax, brakeMin, brakeMax, clutchMin, clutchMax, wheelMax;
uint32_t timer;
#include <EEPROM.h>
#include "HID-Project.h"
void setup() {
pinMode(BUTT_BR, INPUT_PULLUP);
pinMode(BUTT_UP, INPUT_PULLUP);
pinMode(BUTT_DW, INPUT_PULLUP);
pinMode(BUTT_CAL, INPUT_PULLUP);
setupTmr();
debug();
calibration();
EEPROM.get(0, throttleMin);
EEPROM.get(2, throttleMax);
EEPROM.get(4, brakeMin);
EEPROM.get(6, brakeMax);
EEPROM.get(8, clutchMin);
EEPROM.get(10, clutchMax);
EEPROM.get(12, wheelMax);
Gamepad.begin();
//Serial.begin(9600);
}
void loop() {
gamepadTick();
// при нажатии кнопки калибровки скидываем позицию руля в 0
if (!digitalRead(BUTT_CAL)) {
encCounter = 0;
}
}
void encTick() {
state0 = digitalRead(ENC_A);
if (state0 != lastState) {
#if (ENC_TYPE == 1)
turnFlag = !turnFlag;
if (turnFlag)
encCounter += (digitalRead(ENC_B) != lastState) ? -1 : 1;
#else
encCounter += (digitalRead(ENC_B) != lastState) ? -1 : 1;
#endif
lastState = state0;
}
}
void gamepadTick() {
if (millis() - timer > 10) {
timer = millis();
int wheel;
if (INV_WHEEL) wheel = constrain(-encCounter, -wheelMax, wheelMax);
else wheel = constrain(encCounter, -wheelMax, wheelMax);
wheel = map(wheel, -wheelMax, wheelMax, -32768, 32767);
Gamepad.xAxis(wheel);
int thr, br, cl;
thr = map(analogRead(POT_THR), throttleMin, throttleMax, -128, 127);
thr = constrain(thr, -128, 127);
Gamepad.zAxis(thr);
br = map(analogRead(POT_BR), brakeMin, brakeMax, -128, 127);
br = constrain(br, -128, 127);
Gamepad.rzAxis(br);
cl = map(analogRead(POT_CL), clutchMin, clutchMax, -128, 127);
cl = constrain(cl, -128, 127);
Gamepad.YAxis(cl);
if (!digitalRead(BUTT_BR)) Gamepad.press(1);
else Gamepad.release(1);
Gamepad.write();
if (!digitalRead(BUTT_UP)) Gamepad.press(2);
else Gamepad.release(2);
Gamepad.write();
if (!digitalRead(BUTT_DW)) Gamepad.press(3);
else Gamepad.release(3);
Gamepad.write();
}
}
// калибровка
void calibration() {
if (!digitalRead(BUTT_CAL)) { // нажата кнопка
while (!digitalRead(BUTT_CAL)); // пока кнопка удерживается
Serial.begin(9600);
delay(100);
Serial.print(F("Calibration start"));
encCounter = 0;
int zeroTHR = analogRead(POT_THR);
int zeroBR = analogRead(POT_BR);
int zeroCL = analogRead(POT_CL);
int maxTHR, maxBR, maxCL, maxWHEEL;
EEPROM.put(0, zeroTHR);
EEPROM.put(4, zeroBR);
EEPROM.put(8, zeroCL);
delay(100); // дебаунс
while (true) { // крутимся
if (!digitalRead(BUTT_CAL)) break;
maxTHR = analogRead(POT_THR);
maxBR = analogRead(POT_BR);
maxCL = analogRead(POT_CL);
Serial.println(encCounter);
}
EEPROM.put(2, maxTHR);
EEPROM.put(6, maxBR);
EEPROM.put(10, maxCL);
EEPROM.put(12, abs(encCounter));
Serial.println(F("Calibration end"));
Serial.print(F("Wheel: "));
Serial.println(abs(encCounter));
Serial.print(F("Throat: "));
Serial.print(zeroTHR);
Serial.print(" - ");
Serial.println(maxTHR);
Serial.print(F("Brake: "));
Serial.print(zeroBR);
Serial.print(" - ");
Serial.println(maxBR);
Serial.print(F("Clutch: "));
Serial.print(zeroCL);
Serial.print(" - ");
Serial.println(maxCL);
Serial.println();
}
Serial.end();
delay(3000); // задержка чтобы кнопку отпустить
}
// дебаг
void debug() {
#if (DEBUG == 1)
Serial.begin(9600);
uint32_t timer;
while (true) {
encTick();
if (millis() - timer > 100) {
timer = millis();
Serial.print(encCounter);
Serial.print("\t");
Serial.print(analogRead(POT_THR));
Serial.print("\t");
Serial.print(analogRead(POT_BR));
Serial.print("\t");
Serial.print(analogRead(POT_CL));
Serial.print("\t");
Serial.print(!digitalRead(BUTT_BR));
Serial.print("\t");
Serial.print(!digitalRead(BUTT_UP));
Serial.print("\t");
Serial.print(!digitalRead(BUTT_DW));
Serial.print("\t");
Serial.println(!digitalRead(BUTT_CAL));
}
}
Serial.end();
#endif
}
// опрос энкодера в прерывании
ISR(TIMER3_COMPA_vect) {
encTick();
}
// ставим таймер 3, канал А, период 0.5 мс. Для опроса энкодера
void setupTmr() {
TCCR3B = 0b00001001;
TIMSK3 = 0b00000010;
OCR3AH = highByte(15999 / 2);
OCR3AL = lowByte(15999 / 2);
}
#define DEBUG 0 // режим отладки
#define ENC_TYPE 1 // тип энкодера, 0 или 1
#define INV_WHEEL 0 // инверсия руля
// пины
#define ENC_A 5 // пин энкодера
#define ENC_B 6 // пин энкодера
#define POT_THR A0 // педаль газа
#define POT_BR A1 // педаль тормоза
#define POT_CL A2 // педаль сцепления
#define BUTT_BR 9 // кнопка ручника
#define BUTT_UP 7 // кнопка повышения передачи
#define BUTT_DW 8 // кнопка понижения передачи
#define BUTT_CAL 3 // кнопка калибровки
volatile int encCounter = 0;
volatile boolean state0, lastState, turnFlag;
int throttleMin, throttleMax, brakeMin, brakeMax, clutchMin, clutchMax, wheelMax;
uint32_t timer;
#include <EEPROM.h>
#include "HID-Project.h"
void setup() {
pinMode(BUTT_BR, INPUT_PULLUP);
pinMode(BUTT_UP, INPUT_PULLUP);
pinMode(BUTT_DW, INPUT_PULLUP);
pinMode(BUTT_CAL, INPUT_PULLUP);
setupTmr();
debug();
calibration();
EEPROM.get(0, throttleMin);
EEPROM.get(2, throttleMax);
EEPROM.get(4, brakeMin);
EEPROM.get(6, brakeMax);
EEPROM.get(8, clutchMin);
EEPROM.get(10, clutchMax);
EEPROM.get(12, wheelMax);
Gamepad.begin();
//Serial.begin(9600);
}
void loop() {
gamepadTick();
// при нажатии кнопки калибровки скидываем позицию руля в 0
if (!digitalRead(BUTT_CAL)) {
encCounter = 0;
}
}
void encTick() {
state0 = digitalRead(ENC_A);
if (state0 != lastState) {
#if (ENC_TYPE == 1)
turnFlag = !turnFlag;
if (turnFlag)
encCounter += (digitalRead(ENC_B) != lastState) ? -1 : 1;
#else
encCounter += (digitalRead(ENC_B) != lastState) ? -1 : 1;
#endif
lastState = state0;
}
}
void gamepadTick() {
if (millis() - timer > 10) {
timer = millis();
int wheel;
if (INV_WHEEL) wheel = constrain(-encCounter, -wheelMax, wheelMax);
else wheel = constrain(encCounter, -wheelMax, wheelMax);
wheel = map(wheel, -wheelMax, wheelMax, -32768, 32767);
Gamepad.xAxis(wheel);
int thr, br, cl;
thr = map(analogRead(POT_THR), throttleMin, throttleMax, -128, 127);
thr = constrain(thr, -128, 127);
Gamepad.zAxis(thr);
br = map(analogRead(POT_BR), brakeMin, brakeMax, -128, 127);
br = constrain(br, -128, 127);
Gamepad.rzAxis(br);
cl = map(analogRead(POT_CL), clutchMin, clutchMax, -128, 127);
cl = constrain(cl, -128, 127);
Gamepad.YAxis(cl);
if (!digitalRead(BUTT_BR)) Gamepad.press(1);
else Gamepad.release(1);
Gamepad.write();
if (!digitalRead(BUTT_UP)) Gamepad.press(2);
else Gamepad.release(2);
Gamepad.write();
if (!digitalRead(BUTT_DW)) Gamepad.press(3);
else Gamepad.release(3);
Gamepad.write();
}
}
// калибровка
void calibration() {
if (!digitalRead(BUTT_CAL)) { // нажата кнопка
while (!digitalRead(BUTT_CAL)); // пока кнопка удерживается
Serial.begin(9600);
delay(100);
Serial.print(F("Calibration start"));
encCounter = 0;
int zeroTHR = analogRead(POT_THR);
int zeroBR = analogRead(POT_BR);
int zeroCL = analogRead(POT_CL);
int maxTHR, maxBR, maxCL, maxWHEEL;
EEPROM.put(0, zeroTHR);
EEPROM.put(4, zeroBR);
EEPROM.put(8, zeroCL);
delay(100); // дебаунс
while (true) { // крутимся
if (!digitalRead(BUTT_CAL)) break;
maxTHR = analogRead(POT_THR);
maxBR = analogRead(POT_BR);
maxCL = analogRead(POT_CL);
Serial.println(encCounter);
}
EEPROM.put(2, maxTHR);
EEPROM.put(6, maxBR);
EEPROM.put(10, maxCL);
EEPROM.put(12, abs(encCounter));
Serial.println(F("Calibration end"));
Serial.print(F("Wheel: "));
Serial.println(abs(encCounter));
Serial.print(F("Throat: "));
Serial.print(zeroTHR);
Serial.print(" - ");
Serial.println(maxTHR);
Serial.print(F("Brake: "));
Serial.print(zeroBR);
Serial.print(" - ");
Serial.println(maxBR);
Serial.print(F("Clutch: "));
Serial.print(zeroCL);
Serial.print(" - ");
Serial.println(maxCL);
Serial.println();
}
Serial.end();
delay(3000); // задержка чтобы кнопку отпустить
}
// дебаг
void debug() {
#if (DEBUG == 1)
Serial.begin(9600);
uint32_t timer;
while (true) {
encTick();
if (millis() - timer > 100) {
timer = millis();
Serial.print(encCounter);
Serial.print("\t");
Serial.print(analogRead(POT_THR));
Serial.print("\t");
Serial.print(analogRead(POT_BR));
Serial.print("\t");
Serial.print(analogRead(POT_CL));
Serial.print("\t");
Serial.print(!digitalRead(BUTT_BR));
Serial.print("\t");
Serial.print(!digitalRead(BUTT_UP));
Serial.print("\t");
Serial.print(!digitalRead(BUTT_DW));
Serial.print("\t");
Serial.println(!digitalRead(BUTT_CAL));
}
}
Serial.end();
#endif
}
// опрос энкодера в прерывании
ISR(TIMER3_COMPA_vect) {
encTick();
}
// ставим таймер 3, канал А, период 0.5 мс. Для опроса энкодера
void setupTmr() {
TCCR3B = 0b00001001;
TIMSK3 = 0b00000010;
OCR3AH = highByte(15999 / 2);
OCR3AL = lowByte(15999 / 2);
}
и еще вопрос, что это за "racing_mode" в вашем коде, когда он включен, а когда выключен?
Изменено:



