Всем привет. Сегодня попробую вам рассказать историю о том как я подключал Robotdyn Mega +WiFi R3 ATmega2560+ESP8266. Ну поехали!
На самом деле, написал уже почти всю историю о том, как я покупал и прошивал все это дело. Но что-то переклинило и тупо все удалил. Попробую описать саму суть. Если честно, данное решение найдено в самом комьюнити Blynk'a и хотелось б сказать огромное спасибо пользователям [Merlin1105] и [bjorgvinben]. Но пришлось немного поломать голову, т.к. их ответы были в разных топиках.
И так! Для того чтоб нашла плата заработала нам необходимо:
Скачиваем:
Прошивка ESP:
Переключаем DIP переключатели, в режим прошивки ESP. Переключаем [5, 6, 7] контакты в положение ON , Остальные оставляем в положении OFF.
Запускаем Flash Download Tools, и указываем пути до бинарников с лед параметрами:
* user1.1024.new.2.bin используем из папки 512+512
 На этома прошивка ESP закончена. Идем дальше...
На этома прошивка ESP закончена. Идем дальше...
Прошивка Arduino Mega:
Переключаем DIP переключатели, в режим прошивки Arduino. Переключаем [3, 4] контакты в положение ON , Остальные оставляем в положении OFF.
Все так же можно использовать код из конструктора, а именно пример #17. Но есть один момент. Нужно [Serial1] изменить на [Serial3].
Т.е. код должен принять вот такой вид:
Далее переключаем переключатели чтоб получилось: [1, 2, 3, 4] в положении ON, остальные в положении OFF. Готово!
В принципе на этом вся история закончилась. Всем спасибо и удачи!
Полезности (не реклама):
Тесты RobotDyn
Небольшая статья на хабре
P.S. Писал ночью, поэтому буду обновлять тему и добавлю скриншотов!
На самом деле, написал уже почти всю историю о том, как я покупал и прошивал все это дело. Но что-то переклинило и тупо все удалил. Попробую описать саму суть. Если честно, данное решение найдено в самом комьюнити Blynk'a и хотелось б сказать огромное спасибо пользователям [Merlin1105] и [bjorgvinben]. Но пришлось немного поломать голову, т.к. их ответы были в разных топиках.
И так! Для того чтоб нашла плата заработала нам необходимо:
- Прошить саму ESP
- Прошить саму Arduino
Скачиваем:
Прошивка ESP:
Переключаем DIP переключатели, в режим прошивки ESP. Переключаем [5, 6, 7] контакты в положение ON , Остальные оставляем в положении OFF.
Запускаем Flash Download Tools, и указываем пути до бинарников с лед параметрами:
C++:
boot_v1.5.bin 0x00000
user1.1024.new.2.bin 0x01000
esp_init_data_default.bin 0x3fc000 (optional)
blank.bin 0x7e000 & 0x3fe000Прошивка Arduino Mega:
Переключаем DIP переключатели, в режим прошивки Arduino. Переключаем [3, 4] контакты в положение ON , Остальные оставляем в положении OFF.
Все так же можно использовать код из конструктора, а именно пример #17. Но есть один момент. Нужно [Serial1] изменить на [Serial3].
Т.е. код должен принять вот такой вид:
C++:
#define BLYNK_PRINT Serial
#include <ESP8266_Lib.h>
#include <BlynkSimpleShieldEsp8266.h>
// You should get Auth Token in the Blynk App.
// Go to the Project Settings (nut icon).
char auth[] = "TOKEN";
// Your WiFi credentials.
// Set password to "" for open networks.
char ssid[] = "SSID";
char pass[] = "PASSSWORD";
// Hardware Serial on Mega, Leonardo, Micro...
#define EspSerial Serial3
// or Software Serial on Uno, Nano...
//#include <SoftwareSerial.h>
//SoftwareSerial EspSerial(2, 3); // RX, TX
// Your ESP8266 baud rate:
#define ESP8266_BAUD 115200
ESP8266 wifi(&EspSerial);
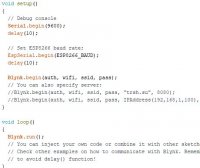
void setup()
{
// Debug console
Serial.begin(9600);
delay(10);
// Set ESP8266 baud rate;
EspSerial.begin(ESP8266_BAUD);
delay(10);
Blynk.begin(auth, wifi, ssid, pass);
// You can also specify server:
//Blynk.begin(auth, wifi, ssid, pass, "trsh.su", 8080);
//Blynk.begin(auth, wifi, ssid, pass, IPAddress(192,168,1,100), 8080);
}
void loop()
{
Blynk.run();
// You can inject your own code or combine it with other sketches.
// Check other examples on how to communicate with Blynk. Remember
// to avoid delay() function!
}В принципе на этом вся история закончилась. Всем спасибо и удачи!
Полезности (не реклама):
Тесты RobotDyn
Небольшая статья на хабре
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | RXD/TXD |
Все независимые | - | - | - | - | - | - | - | - | 0 |
USB <--> ATmega2560 | - | - | ON | ON | - | - | - | - | 0 |
USB <--> ESP8266 (Прошивка) | - | - | - | - | ON | ON | ON | - | 0 |
USB <--> ESP8266 | - | - | - | - | ON | ON | - | - | 0 |
ATmega2560 <--> ESP8266 | ON | ON | - | - | - | - | - | - | 0 |
USB <--> ATmega2560 <--> ESP8266 | ON | ON | ON | ON | - | - | - | - | 3 |
P.S. Писал ночью, поэтому буду обновлять тему и добавлю скриншотов!
Вложения
-
12.1 MB Просмотры: 608
Изменено: