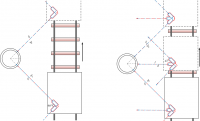
Система контроля угла наклона опор контактной сети железных дорог Цель создать мобильное устройство для измерения возможного угла наклона опор контактной сети со стороны пути на самоходную единицу. Изначально планировалось измерения в движение, но изучая характеристики имеющих лазерных датчиков расстояние (а именно частоту измерения и погрешность измерения) от этой идеи отказались. Было принято при подъезде к опоре останавливаться и для точности в каждой плоскости измерять по три раза. Каждую опору измеряем возможный угол наклона в трех плоскостях 45°, 90° и 135°. Принцип измерения изображен в следующих рисунках.


Железобетонные опорные стоики имеют небольшую конусность и при измерение угла наклона это нужно учитывать при расчете (например опор типа СС β≈0,425°) Зная это в образованном треугольники А1А2А3 определяем угол наклона φ по теореме косинусов.
Для данной системы были выбраны лазерные датчики расстояния U81(U85) китайской фирмы JRT (ниже приведены её характеристики)

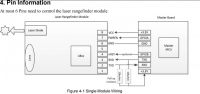
Планируется подключить через интерфейс RS232 и написать программу по разработанному алгоритму.
В процессе измерения необходимо одновременных получать сигнал от двух лазерных датчиков расстояния, при этом для точности измерения (так самоходная единицы на которой будет установлен данное устройство может наклонятся) надо все измерения фильтровать при помощи MPU-6050 (3-осевой акселерометр и 3-осевой гироскоп) и фиксировать координаты место положения измеряемой опоры при помощи GPS модуля.
В чем и как лучше это реализовать? Вся сложность проекта как одновременно измерять с двух лазеров и одновременно фильтровать возможные неровные положения тележки и фиксировать место положение измеряемого объекта.
размер оплаты Договорной
срок на её выполнение; ближайшие 2-3 месяца
регион заказчика Ташкент (Узбекистан)
способ связи https://vk.com/id89956038; telegram @mr.BT
Железобетонные опорные стоики имеют небольшую конусность и при измерение угла наклона это нужно учитывать при расчете (например опор типа СС β≈0,425°) Зная это в образованном треугольники А1А2А3 определяем угол наклона φ по теореме косинусов.
Для данной системы были выбраны лазерные датчики расстояния U81(U85) китайской фирмы JRT (ниже приведены её характеристики)
Планируется подключить через интерфейс RS232 и написать программу по разработанному алгоритму.
В процессе измерения необходимо одновременных получать сигнал от двух лазерных датчиков расстояния, при этом для точности измерения (так самоходная единицы на которой будет установлен данное устройство может наклонятся) надо все измерения фильтровать при помощи MPU-6050 (3-осевой акселерометр и 3-осевой гироскоп) и фиксировать координаты место положения измеряемой опоры при помощи GPS модуля.
В чем и как лучше это реализовать? Вся сложность проекта как одновременно измерять с двух лазеров и одновременно фильтровать возможные неровные положения тележки и фиксировать место положение измеряемого объекта.
размер оплаты Договорной
срок на её выполнение; ближайшие 2-3 месяца
регион заказчика Ташкент (Узбекистан)
способ связи https://vk.com/id89956038; telegram @mr.BT