
Вопросы по NRF24L01
- Автор темы sasha320v
- Дата начала

@Геннадий П,я в своё время ВЕСЬ даташит распечатал и на работе в свободное время каждый регистр и команду чуть ли не побитно сравнивал с библиотечными файлами,вникал в логику работы и головы разработчиков этой железки. Спустя неделю психанул,распаял всё,спаял обратно...и заработало?
Так что тут способ стандартный: брать классический скетч сканера. А далее уже вникать и под себя настраивать. В общем,Вы и сами знаете.
Там ведь логика такова:
Читается весь пакет из буфера и сбрасываются флаги приёма пакета. Возможно они и не сбрасываются,раз чтение неполное,соответственно последующие пакеты просто не принимаются,т.к буфер заполнен.
В режиме фиксированного размера эта команда ПайлоадСайз указывает размер который будет передаваться,независимо от количества записаных байт в буфер.
А вот со стороны приёмника хз,не проверял. Но мне кажется там "не засчитывается" не полное чтение буфера,соответственно буфер не сбрасывается.
Максимальный размер аппаратного буфера 32 байта. Буфера 3 шт.
Так что тут способ стандартный: брать классический скетч сканера. А далее уже вникать и под себя настраивать. В общем,Вы и сами знаете.
Там ведь логика такова:
Читается весь пакет из буфера и сбрасываются флаги приёма пакета. Возможно они и не сбрасываются,раз чтение неполное,соответственно последующие пакеты просто не принимаются,т.к буфер заполнен.
В режиме динамического размера эта команда игнорируется,т.е. сколько в буфер запишет мк,столько нрф и отправит.это максимальный размер передаваемого блока
В режиме фиксированного размера эта команда ПайлоадСайз указывает размер который будет передаваться,независимо от количества записаных байт в буфер.
А вот со стороны приёмника хз,не проверял. Но мне кажется там "не засчитывается" не полное чтение буфера,соответственно буфер не сбрасывается.
Максимальный размер аппаратного буфера 32 байта. Буфера 3 шт.
Тоже два дня мучаюсь с проблемой странного приёма. Вроде как все сообщения уходят благополучно, но приёмник принимает только если на большой частоте отправка идёт. И то как-то с грехом пополам, как-то случайно выхватывая данные. Решил проблему, отсылая сдвоенным импульсом одну и ту же переменную, без задержки, тупо в цикле for. Приёмник почему-то вторую (как и остальные из цепочки отправки, хотя принимает на одну отправку меньше чем указано в for, просто каждый раз принимает одно и то же первое число, даже если отправлять разные) отправку игнорирует, но первую принимает хорошо, с любой задержкой между отправками..
Далее хочу попробовать воспользоваться советом выше, с удалением библиотеки Гайвера и заменой на ту, которая есть в теме.
TX:
void loop() {
for(int i = 0; i < 2; i ++) {
radio.write(&counter, sizeof(counter));
Serial.println(counter + i);
}
counter++;
delay(2000);
}
RX:
void loop() {
byte gotByte;
if (radio.available()) {
radio.read(&gotByte, sizeof(gotByte)); // чиатем входящий сигнал
Serial.print("Recieved: "); //Serial.print(count); Serial.print(" ");
Serial.println(gotByte);
}
}Вы немного заблуждаетесь. Библиотека servo.h поддерживает до 12 сервоприводов. А вот при использовании вышеуказанной библиотеки пропадает возможность формирования ШИМ сигнала на пинах D9, D10.насколько я знаю, библиотека Servo не поддерживает другие пины для серво кроме D9 и D10 на плате Nano
Для функции radio.read() первым аргументом должен быть адрес массива received_data, а не сам массив.radio.read(received_data, sizeof(received_data));
Т.е. правильно будет так:
radio.read(&received_data, sizeof(received_data));P.S. На форуме любой код нужно вставлять соответствующим тегом. Иначе мало кому вообще захочется такое смотреть.
Изменено:
Ключевое слово "почти". Я не собираюсь спорить и обсуждать здесь все нюансы. Если интересно - откройте любой учебник по языку Си или С++.Массив и указатель на него почти одно и то же.
Изменено:
В последней версии библиотеки RF24.h описано следующее:
Это явно не то, что применяете Вы:
Аналогично по записи:
Строку:
нужно записать как
Поскольку transmit_data уже является указателем.
void openReadingPipe(uint8_t number, const uint8_t* address);Это явно не то, что применяете Вы:
radio.openReadingPipe(1,address[0]);Аналогично по записи:
void openWritingPipe(const uint8_t* address);radio.openWritingPipe(address[0]);Строку:
radio.write(&transmit_data, sizeof(transmit_data)); нужно записать как
radio.write(transmit_data, sizeof(transmit_data)); Поскольку transmit_data уже является указателем.
Изменено:
Здравствуйте, сделал управление на 4-ех кнопках, использовал нрф24 и ардуино. Производил тесты подключив к выходам 4 светодиода на другой ардуине, думая что если загорается значит там есть около 5 вольт, но как оказалось там очень странные значения напряжений от 1.6В до 2.6В и его не хватает для управления нагрузкой.
Вопрос, как это решить и из-за чего происходит? (так же хотел спросить что нужно добавить в код, чтобы когда передатчик с приемником теряет связь, приемник не "застревал" в последнем положении какой-нибудь из управляющих кнопок, а просто выдавал 0 на выходах)
Вопрос, как это решить и из-за чего происходит? (так же хотел спросить что нужно добавить в код, чтобы когда передатчик с приемником теряет связь, приемник не "застревал" в последнем положении какой-нибудь из управляющих кнопок, а просто выдавал 0 на выходах)
Передатчик:
//передатчик
#include <SPI.h>
#include <RF24.h>
RF24 radio(9, 10); // порты D9, D10: CSN CE
const uint32_t pipe = 111156789; // адрес рабочей трубы;
byte address[][6] = {"1Node", "2Node", "3Node", "4Node", "5Node", "6Node"}; //возможные номера труб
byte butt1=3;
byte butt2=4;
byte butt3=5;
byte butt4=6;
byte transmit_data[4];
void setup() {
Serial.begin(115200);
Serial.println("TransmitterTester ON");
radio.begin(); // инициализация
delay(2000);
radio.setDataRate(RF24_1MBPS); // скорость обмена данными RF24_1MBPS или RF24_2MBPS
radio.setCRCLength(RF24_CRC_8); // размер контрольной суммы 8 bit или 16 bit
radio.setPALevel(RF24_PA_MAX); // уровень питания усилителя RF24_PA_MIN, RF24_PA_LOW, RF24_PA_HIGH and RF24_PA_MAX
radio.setChannel(0x6f); // установка канала
radio.setAutoAck(false); // автоответ
radio.powerUp(); // включение или пониженное потребление powerDown - powerUp
radio.stopListening(); //радиоэфир не слушаем, только передача
radio.openWritingPipe(pipe); // открыть трубу на отправку
pinMode(butt1, INPUT_PULLUP);
pinMode(butt2, INPUT_PULLUP);
pinMode(butt3, INPUT_PULLUP);
pinMode(butt4, INPUT_PULLUP);
}
void loop() {
transmit_data[0]= !digitalRead(butt1);
transmit_data[1]= !digitalRead(butt2);
transmit_data[2]= !digitalRead(butt3);
transmit_data[3]= !digitalRead(butt4);
radio.write(&transmit_data, sizeof(transmit_data));
}
Приемник:
// приемник
#include <SPI.h>
#include "nRF24L01.h"
#include "RF24.h"
RF24 radio(9, 10); // порты D9, D10: CSN CE
const uint32_t pipe = 111156789; // адрес рабочей трубы;
byte received_data[4];
byte address[][6] = {"1Node", "2Node", "3Node", "4Node", "5Node", "6Node"};
byte led1 = 3;
byte led2 = 4;
byte led3 = 5;
byte led4 = 6;
void setup() {
Serial.begin(9600);
Serial.println("ReceiverTester ON");
radio.begin(); // инициализация
delay(2000);
radio.setDataRate(RF24_1MBPS); // скорость обмена данными RF24_1MBPS или RF24_2MBPS
radio.setCRCLength(RF24_CRC_8); // размер контрольной суммы 8 bit или 16 bit
radio.setChannel(0x6f); // установка канала
radio.setAutoAck(false); // автоответ
radio.openReadingPipe(1, pipe); // открыть трубу на приём
radio.startListening(); // приём
digitalWrite(led1, OUTPUT);
digitalWrite(led2, OUTPUT);
digitalWrite(led3, OUTPUT);
digitalWrite(led4, OUTPUT);
}
void loop() {
byte pipeNo;
while ( radio.available(&pipeNo)) {
radio.read(&received_data, sizeof(received_data));
}
digitalWrite(led1, received_data[0]);
digitalWrite(led2, received_data[1]);
digitalWrite(led3, received_data[2]);
digitalWrite(led4, received_data[3]);
}светодиоды в таком случае подключаются к выводам Ардуино через сопротивления.подключив к выходам 4 светодиода
выводы Ардуино имеют ограничения на ток, который они могут обеспечить и это, в целом 20-40мА, при этом суммарный ток, потребляемый всей микросхемой не должен превышать 100мА. Для управления более мощными нагрузками необходимо использовать драйверы или делать управление на транзисторах.не хватает для управления нагрузкой.
@Bogdan.L,
схему - в студию. Где мерили напряжение:я через резисторы светодиоды подключил
?от 1.6В до 2.6В
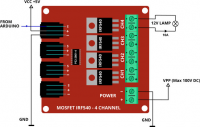
MOSFET не может ничего потреблять со стороны управляющего электрода. Даже если Вы его включили вместо светодиодов (оставив сопротивление), то на него должно идти максимальное напряжение на выводе Ардуино (с оговоркой, что не используется высокая частота переключения, что вряд ли имеет место быть). То, что MOSFET не открывается - означает только то, что он выбран неверно. Опять же имеет смысл говорить только при наличии схемы.один мосфет потребляет в открытом состоянии 12-14 мА
@viktor1703, Ага, понял, спасибо за уточнение
@PiratFox, @PiratFox, По-поводу radio.read - спасибо, исправил. Но проблема, к сожалению, осталась. По-поводу того, как нормально нужно вставлять код - также спасибо. Первый раз сижу на таких форумах, буду знать.
@poty, Спасибо, исправил. Но, если это должно было решить проблему, - оно её не решило. На всякий случай, коды исправил в самом вопросе (в начале обсуждения), в соответствии с Вашими замечаниями.
@PiratFox, @PiratFox, По-поводу radio.read - спасибо, исправил. Но проблема, к сожалению, осталась. По-поводу того, как нормально нужно вставлять код - также спасибо. Первый раз сижу на таких форумах, буду знать.
@poty, Спасибо, исправил. Но, если это должно было решить проблему, - оно её не решило. На всякий случай, коды исправил в самом вопросе (в начале обсуждения), в соответствии с Вашими замечаниями.
@Максим_Л, а что исправлено? Поставлен пробел? В прототипе функций в первых двух случаях используется указатель на строку идентификатора, а Вы запихиваете туда значение из массива.
Вот например, описание метода создания соединения со стороны приёмника:
Вот метод, позволяющий изменить размер адреса:
Сравним с Вашим размером адреса:
64 бит!
Т.о., нужно:
1. Привести длину адреса к 5 байтам (длине по умолчанию).
2. Передавать в качестве параметра не значение адреса, а адрес его первого байта.
C++:
/**
* Создание соединения для чтения данных
*
* Одновременно может быт ьоткрыто до 6 соединений для чтения. После открытия всех необходимых соединений
* для чтения вызовите startListening().
*
* @see
* - openWritingPipe()
* - setAddressWidth()
*
* @note Соединения 0 и 1 будут использовать полный адрес длиной 5 байт. Соединения 2-5 будут использовать
* только первый байт адреса, применяя для остальных 4 байт значения соединения 1
* Адреса соединений 1-5 могут отличаться только первым байтом.
* Только первый байт в массиве адресов может быть уникальным, например
* @code
* uint8_t addresses[][6] = {"Prime", "2Node", "3xxxx", "4xxxx"};
* openReadingPipe(0, addresses[0]); // используется "Prime"
* openReadingPipe(1, addresses[1]); // используется "2Node"
* openReadingPipe(2, addresses[2]); // используется "3Node"
* openReadingPipe(3, addresses[3]); // используется "4Node"
* @endcode
*
* @warning
* @parblock
* If the reading pipe 0 is opened by this function, the address
* passed to this function (for pipe 0) will be restored at every call to
* startListening().
*
* Read
* http://maniacalbits.blogspot.com/2013/04/rf24-addressing-nrf24l01-radios-require.html
* to understand how to avoid using malformed addresses. This address
* restoration is implemented because of the underlying necessary
* functionality of openWritingPipe().
* @endparblock
*
* @param number Какое соединение открыть. Можно открыть только соединения с номерами 0-5,
* все адреса, присвоенные соединениям за пределами этих номеров будут проигнорированы.
* @param address 24, 32 или 40 бит адрес открываемого соединения.
*
* Параметр длины адреса опущен, поскольку будет использоваться только то количество байт
* (для соединений 0 и 1) которое установлено методом setAddressWidth().
*/
void openReadingPipe(uint8_t number, const uint8_t* address);
C++:
/**
* Устанавливает размер адреса от 3 до 5 байт (24, 32 или 40 бит)
*
* @param a_width Размер адреса в байтах; может принимать значение 3, 4 или
* 5.
*/
void setAddressWidth(uint8_t a_width);
uint64_t address[]
64 бит!
Т.о., нужно:
1. Привести длину адреса к 5 байтам (длине по умолчанию).
2. Передавать в качестве параметра не значение адреса, а адрес его первого байта.
Изменено:
Автоподтверждение приёма не работает на 250 kbps. Либо 1 или 2 mbps, либо без автоподтверждения.
Зачем radio.setRetries(0, 15); ? Так уверены в качестве связи? Поставьте хотя бы 5 попыток.
И почему radio.setPayloadSize(32) ? У Вас 1 байт только передать.
Ещё раз напомню: вдумывайтесь в то,что кодите. Не надо слепо копировать.
Зачем radio.setRetries(0, 15); ? Так уверены в качестве связи? Поставьте хотя бы 5 попыток.
И почему radio.setPayloadSize(32) ? У Вас 1 байт только передать.
Ещё раз напомню: вдумывайтесь в то,что кодите. Не надо слепо копировать.
Наверно,запамятовал)попыток то 15
Я уже где-то писал о своём опыте. Когда так же не завелась связь по чужому коду. Начал с малого и далее:
1. Проверил связь МК и нрф приемника и передатчика
2. На гайверовском скетче "сканер" проверил приём
3. Проверил сканером передатчик в режиме несущей.
4. И ещё 33 пункта)))
@VictorArx, в передатчике делей в сетапе и по сути не должен влиять на что либо. измерительный прибор мультиметр rm101. номиналы резисторов 200 Ом. Измерения проводил относительно пина Д3 и земли.
Подключил выходы к такому модулю и меряю относительно контактов SIG подключенных к нему д3 и GND когда нажимаю на кнопку на мультиметре показывает 1 вольт
Подключил выходы к такому модулю и меряю относительно контактов SIG подключенных к нему д3 и GND когда нажимаю на кнопку на мультиметре показывает 1 вольт
Поделиться: