Вообщем дело такое, я использовал вот такой вот код:
#include <Servo.h>
Servo myservo;
#define button1B 3 // пин кнопки button1
boolean button1S; // храним состояния кнопок (S - State)
boolean button1F; // флажки кнопок (F - Flag)
boolean button1R; // флажки кнопок на отпускание (R - Release)
boolean button1P; // флажки кнопок на нажатие (P - Press)
boolean button1H; // флажки кнопок на удержание (многократный вызов) (H - Hold)
boolean button1HO; // флажки кнопок на удержание (один вызов при нажатии) (HO - Hold Once)
boolean button1D; // флажки кнопок на двойное нажатие (D - Double)
boolean button1DP; // флажки кнопок на двойное нажатие и отпускание (D - Double Pressed)
boolean servoW; // флаг ожидание серво под 0 градусов
boolean servoC; // флаг перевести в 160 градусов для выключения удлинителя
#define double_timer 100 // время (мс), отведённое на второе нажатие
#define hold 500 // время (мс), после которого кнопка считается зажатой
#define debounce 80 // (мс), антидребезг
unsigned long button1_timer; // таймер последнего нажатия кнопки
unsigned long button1_double; // таймер двойного нажатия кнопки
void setup() {
Serial.begin(9600);
pinMode(button1B, INPUT_PULLUP);
myservo.attach(9);
}
void loop() {
//-------опрос кнопок--------
button1S = !digitalRead(button1B);
buttons(); //отработка кнопок
//-------опрос кнопок--------
// отработка режимов (опускание флага обязательно!)
if (button1P) {
Serial.println("pressed");
button1P = 0;
}
if (button1D) {
Serial.println("double");
button1D = 0;
}
if (button1H && button1HO) {
Serial.println("hold once");
button1HO = 0;
}
/*
if (button1H) {
Serial.println("hold");
button1H = 0;
}
*/
}
//------------------------ОТРАБОТКА КНОПОК-------------------------
void buttons() {
//-------------------------button1--------------------------
// нажали (с антидребезгом)
if (button1S && !button1F && millis() - button1_timer > debounce) {
button1F = 1;
button1HO = 1;
button1_timer = millis();
myservo.write(0);
Serial.println("0");
}
// если отпустили до hold, считать отпущенной
if (!button1S && button1F && !button1R && !button1DP && millis() - button1_timer < hold) {
button1R = 1;
button1F = 0;
button1_double = millis();
myservo.write(0);
Serial.println("0");
}
// если отпустили и прошло больше double_timer, считать 1 нажатием
if (button1R && !button1DP && millis() - button1_double > double_timer) {
button1R = 0;
button1P = 1;
myservo.write(0);
Serial.println("0");
}
// если отпустили и прошло меньше double_timer и нажата снова, считать что нажата 2 раз
if (button1F && !button1DP && button1R && millis() - button1_double < double_timer) {
button1F = 0;
button1R = 0;
button1DP = 1;
myservo.write(0);
Serial.println("0");
}
// если была нажата 2 раз и отпущена, считать что была нажата 2 раза
if (button1DP && millis() - button1_timer < hold) {
button1DP = 0;
button1D = 1;
button1_timer = millis();
myservo.write(0);
Serial.println("0");
}
// Если удерживается более hold, то считать удержанием
if (button1F && !button1D && !button1H && millis() - button1_timer > hold) {
button1H = 1;
myservo.write(160);
Serial.println("160");
}
// Если отпущена после hold, то считать, что была удержана
if (!button1S && button1F && millis() - button1_timer > hold) {
button1F = 0;
button1H = 0;
button1_timer = millis();
myservo.write(160);
Serial.println("160");
}
//-------------------------button1--------------------------
}
//------------------------ОТРАБОТКА КНОПОК-------------------------
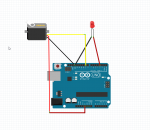
И все работает с кнопкой, но вот припаянный провод от катода на заряднике хоть и дает оповещение о срабатывании, вот только ничего не работает((
На него идёт постоянное напряжение от 0.04 до 2.55Вт, и мне кажется что эти 0.04 считаются как нажатая кнопка, или что-то типа того. Но тогда бы сразу запускался серв на 160 градусов, а он и этого не делает.
Вообщем при попытках подключится, COM выдает что кнопка нажата один раз И ТОЛЬКО КОГДА ДИОД ГОРИТ, когда он тухнет, то подключение ничего не дает и даже когда после подключения диод загорается - тот же результат, ничего.
Что не так?@Krypt0n,