Здравствуйте!
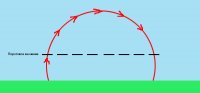
Задача альтиметра, дать сигнал на определённой высоте, но проблема в том, что эта высота будет зафиксирована дважды. Как проигнорировать первую регистрацию? Я не прошу готового кода, но буду благодарен за объяснение, желательно "на пальцах"))
Задача альтиметра, дать сигнал на определённой высоте, но проблема в том, что эта высота будет зафиксирована дважды. Как проигнорировать первую регистрацию? Я не прошу готового кода, но буду благодарен за объяснение, желательно "на пальцах"))