#include <Servo.h>#include <microWire.h>
#include <microLiquidCrystal_I2C.h>
#include <EEPROM.h> // Подключаем библиотеку
#define korector 12 // Задаем корректор чистки
#define FirstLaunchButton 9
#define ElectrodeR 10
#define ElectrodeL 11
#define Pishalka 12
Servo mizinec;
Servo bezimani;
Servo fuck;
Servo ukozatel;
Servo big;
Servo ladon;
Servo povorot;
LiquidCrystal_I2C lcd(0x27, 20, 4); // Задаем адрес Lcd монитора
int SignalSDatchika; // Аналоговый сигнал с датчика
int i; // Сдвиговый регистр
byte index; // Индекс для очистки
int val_0[3]; // Первый этап очистки (Масcив)
int val_Srednie_1[3]; // Среднее арифметические 2 (Массив)
int Srednie_1; // Среднее арифметические 1 (Целое единственное число)
int Srednie_2; // Среднее арифметические 2 (Целое единственное число)
byte flash[3000]; //Значения во flash
byte levo8bit[] = { B00010, B00011, B00111, B01101, B11111, B10111, B10100, B10011};
byte pravo8bit[] = { B01010, B11001, B11101, B10111, B11110, B11100, B00100, B11000};
void setup() {
i = 0;
pinMode(FirstLaunchButton, INPUT);
pinMode(ElectrodeR, INPUT);
pinMode(ElectrodeL, INPUT);
pinMode(Pishalka, OUTPUT);
mizinec.attach(32);
bezimani.attach(33);
fuck.attach(34);
ukozatel.attach(35);
big.attach(36);
ladon.attach(37);
povorot.attach(38);
lcd.init(); // Инициализируем Lcd
lcd.init(); // Инициализируем Lcd X2
lcd.backlight();
lcd.setCursor(0, 1);
lcd.print("Kelll31 Technology");
lcd.createChar(0, levo8bit);
lcd.createChar(1, pravo8bit);
lcd.setCursor(18, 1);
lcd.write(0);
lcd.write(1);
delay(3000);
if (digitalRead(FirstLaunchButton) == 1) {
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("First Launch");
delay(3000);
SearchSzhatie();
Pisk();
delay(3000);
SearchRazhatie();
Pisk();
delay(3000);
SearchPovorotVLevo();
Pisk();
delay(3000);
SearchPovorotVPravo();
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("First Launch");
lcd.setCursor(8, 1);
lcd.print("Ok");
Pisk();
Pisk();
delay(3000);
}
SearchValues();
delay(1000);
}
void loop() {
if (digitalRead(ElectrodeR) == 1 || digitalRead(ElectrodeL) == 1) {
proverka();
}
Sravnenie();
}
void Pisk() {
digitalWrite(Pishalka, HIGH);
delay(250);
digitalWrite(Pishalka, LOW);
delay(250);
}
void SzhadieDo() {
//Здесь должен быть код
}
void RazhatieDo() {
//Здесь должен быть код
}
void PovorotVLevoDo() {
//Здесь должен быть код
}
void PovorotVPravoDo() {
//Здесь должен быть код
}
void Sravnenie() {
nachalo:
lcd.clear();
lcd.home();
lcd.print("Normal mode");
lcd.setCursor(0, 1);
lcd.print(Srednie_2);
delay(5);
i = 0;
chistka();
logika();
while (i < 2999) {
i = i + 1;
if ((i <= 750) && ((Srednie_2 >= flash[i] + korector) or (Srednie_2 <= flash[i] + korector))) {
SzhadieDo();
}
else {
goto nachalo;
}
if ((((i >= 750) && (i <= 1500))) && ((Srednie_2 >= flash[i] + korector) or (Srednie_2 <= flash[i] + korector))) {
RazhatieDo();
}
else {
goto nachalo;
}
if ((((i >= 1500) && (i <= 2250))) && ((Srednie_2 >= flash[i] + korector) or (Srednie_2 <= flash[i] + korector))) {
PovorotVLevoDo();
}
else {
goto nachalo;
}
if ((((i >= 2250) && (i <= 2999))) && ((Srednie_2 >= flash[i] + korector) or (Srednie_2 <= flash[i] + korector))) {
PovorotVPravoDo();
}
else {
goto nachalo;
}
}
}
void SearchSzhatie() {
i = 0;
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("Szhozmite hand");
delay(4000);
Pisk();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
while (i < 750) {
i = i + 1;
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
delay(2);
chistka();
logika();
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory..");
delay(3);
VEEPROM();
}
lcd.clear();
lcd.home();
lcd.print("Szhatie = Ok");
}
void SearchRazhatie() {
i = 750;
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("Razoshmite hand");
delay(4000);
Pisk();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
while (i < 1500) {
i = i + 1;
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
delay(2);
chistka();
logika();
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory..");
delay(3);
VEEPROM();
}
lcd.clear();
lcd.home();
lcd.print("Razhatie = Ok");
}
void SearchPovorotVLevo() {
i = 1500;
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("Povernite hand");
lcd.setCursor(3, 1);
lcd.print("V Levo");
delay(4000);
Pisk();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
while (i < 2250) {
i = i + 1;
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
delay(2);
chistka();
logika();
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory..");
delay(3);
VEEPROM();
}
lcd.clear();
lcd.home();
lcd.print("Povorot V Levo = Ok");
}
void SearchPovorotVPravo() {
i = 2250;
lcd.clear();
lcd.setCursor(1, 0);
lcd.print("Povernite hand");
lcd.setCursor(3, 1);
lcd.print("V Pravo");
delay(3000);
Pisk();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
while (i < 3000) {
i = i + 1;
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory...");
delay(2);
chistka();
logika();
lcd.clear();
lcd.setCursor(1, 2);
lcd.print("Write to memory..");
delay(3);
VEEPROM();
}
lcd.clear();
lcd.home();
lcd.print("Povorot V Pravo = Ok");
}
void VEEPROM() {
EEPROM.update(i, Srednie_2);
}
void SearchValues() {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print("Search values");
lcd.setCursor(1, 1);
lcd.print("in EEPROM");
while (i < 2999) {
i = i + 1;
lcd.setCursor(0, 2);
lcd.print(i);
flash[i] = EEPROM.read(i);
}
lcd.setCursor(10, 2);
lcd.print("Ok");
Pisk();
delay(250);
Pisk();
}
void proverka() {
while (digitalRead(ElectrodeR) == 1 || digitalRead(ElectrodeL) == 1) {
lcd.clear();
lcd.home();
lcd.print("No electrodes connected");
lcd.setCursor(0, 1);
lcd.print("Waiting for connection");
}
lcd.clear();
lcd.home();
lcd.print("Electrodes found");
delay(3000);
}
void chistka() {
SignalSDatchika = analogRead(A0);
if (index > 2) index = 0; // переключаем индекс с 0 до 2 (0, 1, 2, 0, 1, 2…)
val_0[index] = SignalSDatchika; // записываем значение с датчика в массив
index = index + 1;
if (index > 2) index = 0; // переключаем индекс с 0 до 2 (0, 1, 2, 0, 1, 2…)
val_Srednie_1[index] = Srednie_1;
index = index + 1;
}
void logika() {
if (SignalSDatchika >= korector) {
Srednie_1 = (val_0[0] + val_0[1] + val_0[2]) / 3;
}
if (val_Srednie_1[0] >= 1 || val_Srednie_1[1] >= 1 || val_Srednie_1[2] >= 1) {
Srednie_2 = (val_Srednie_1[0] + val_Srednie_1[1] + val_Srednie_1[2]) / 3;
}
Srednie_2 = map(Srednie_2, 0, 820, 0, 255);
}

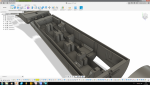
 Но я не сдавался, и поработав над другими моделями освоил эту программу. В итоге у меня вышла красивая модель руки, которую дорабатываю до сих пор.
Но я не сдавался, и поработав над другими моделями освоил эту программу. В итоге у меня вышла красивая модель руки, которую дорабатываю до сих пор.



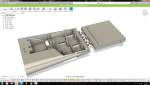
 Т.к у меня недавно появился 3D принтер, то я решил воссоздать свою задумку в реальный объект. (Это прототип, и он ещё разрабатывается)
Т.к у меня недавно появился 3D принтер, то я решил воссоздать свою задумку в реальный объект. (Это прототип, и он ещё разрабатывается)