
ARDUINO Блок опережения зажигания ДВС
- Автор темы esperoty
- Дата начала
Если я ничего не путаю, то должно быть так:
В вашем случае, шторка выходит за пределы оптопары, на выходе датчика 0, катушка отключается.
Первые строки поправьте под свои пины вход/выход. Рекомендую перед заводкой установить arduino на своё место, выкрутив свечу, подвигать взад/вперёд крыльчатку, убедиться что искра происходит в нужный момент.
Затем установить момент искры в положение ВМТ.
UPD: убрал "антисбой", его смысл был в отладке устройства, сейчас кажется нет. С вашим пропорциями шторки он может помешать.
C++:
#define IN 4
#define OUT 5
bool detector;
bool oldDetector;
bool advanceGranted;
unsigned long fuseTime;
unsigned long newTime;
unsigned long oldTime;
unsigned long midTime;
unsigned long periodTime;
unsigned long chargeTime;
unsigned long ignitionAdvance;
int ignitionDegree;
long int rpm;
void setup() {
// put your setup code here, to run once:
Serial.begin(115200); // Start the Serial communication to send messages to the computer
Serial.println("\n");
oldTime = micros(); // сразу нужно установить, чтобы readAll() не споткнулся
fuseTime = micros(); // устанавливается время до выключения катушки
pinMode(IN, INPUT); // D2 от прерывателя
pinMode(OUT, OUTPUT); // D1 к драйверу
pinMode(13, OUTPUT); // LED
digitalWrite(13, LOW); // LED ENABLED
}
void readAll() {
newTime = micros();
periodTime = newTime-oldTime; // длительность всего периода (от закрытия до закрытия)
chargeTime = newTime-midTime; // отрезок цикла от открытия шторки до закрытия (зарядка катушки)
rpm = 60000000/periodTime; // число оборотов
oldTime = micros();
}
void loop() {
detector = digitalRead(IN);
if(detector == LOW && oldDetector == HIGH) { // момент когда шторка открылась
digitalWrite(OUT, LOW); // отключаем катушку в любом случае (ИСКРА) LOW;
oldDetector = detector; // oldDetector = HIGH
readAll(); // подсчёт всех параметров цикла
// калькулятор положения коленвала на всякий случай: http://www.torqsoft.net/piston-position.html#gudgeon
// примерный расчёт коэфициентов взят отсюда: https://customcult.netlify.app/
if(rpm >= 0 && rpm <= 700) {
ignitionDegree = 0;
goto bailout;
}
if(rpm >= 700 && rpm <= 1000) { // 0 - 2.2
ignitionDegree = 0.007 * rpm + (-4.800);
goto bailout;
}
if(rpm >= 1000 && rpm <= 2000) { // 2.2 - 15
ignitionDegree = 0.013 * rpm + (-10.800);
goto bailout;
}
if(rpm >= 2000 && rpm <= 3000) { // 15 - 30
ignitionDegree = 0.015 * rpm + (-15.000);
goto bailout;
}
if(rpm >= 3000 && rpm <= 4000) { // 30 - 40
ignitionDegree = 0.010 * rpm + (0.000);
goto bailout;
}
if(rpm > 4000) {
ignitionDegree = 40;
}
bailout:
ignitionAdvance = chargeTime - ((periodTime / 360) * ignitionDegree);
fuseTime = micros(); // начало отсчёта для предохранителя (отключение катушки зажигания при простое)
// антисбой датчика
//delayMicroseconds(periodTime/5);
}
if(detector == HIGH && oldDetector == LOW) { // момент когда шторка закрылась
digitalWrite(OUT, HIGH); // включаем катушку (ЗАРЯДКА) HIGH; digitalWrite(OUT, HIGH);
oldDetector = detector; // oldDetector = LOW
midTime = micros(); // отметка начала зарядки катушки (середина цикла)
advanceGranted = 1; // блок опережения разрешён
// антисбой датчика
//delayMicroseconds(periodTime/5);
}
if(micros() - midTime >= ignitionAdvance && advanceGranted == 1) { // собственно само опережение
digitalWrite(OUT, LOW); // отключаем катушку (ИСКРА) LOW; digitalWrite(OUT, LOW);
advanceGranted = 0; // больше сюда не возвращаемся до следующего цикла.
}
if(micros() - fuseTime >= 1000000) { // предохранитель, если катушка заряжается больше 1 секунды
digitalWrite(OUT, LOW); // отключаем катушку LOW; digitalWrite(OUT, LOW);
}
}Первые строки поправьте под свои пины вход/выход. Рекомендую перед заводкой установить arduino на своё место, выкрутив свечу, подвигать взад/вперёд крыльчатку, убедиться что искра происходит в нужный момент.
Затем установить момент искры в положение ВМТ.
UPD: убрал "антисбой", его смысл был в отладке устройства, сейчас кажется нет. С вашим пропорциями шторки он может помешать.
Изменено:
@user314,Здравствуйте!,понял,просто я тахометр подключил,и решил узнать,какие холостые держит мой мотороллер муравей,тахометр Китайский цифровой,я не давно его приобрёл,а так много лет,я и не знал какие холостые обороты держит двигатель.Вы,совершенно правы,компрессия не очень хорошая,и ещё в добавок сальники коленвала,уже не важные,через левый сальник,и его алюминиевую проставку,(куда этот сальник крепится) вообще масло всасывается,довольно сильно,из коробки передач в кривошипную камеру,свечу забрасывает маслом нехило,проставка левого сальника вращается,как "рулетка в казино",в общем,в этом скорее всего проблема,то что самые минимальные обороты не держит двигатель,да и карбюратор тоже может вносить свои коррективы.Ещё раз,Вам огромное спасибо!,за Ваши ответы!.С уважением.
@ukr100,
Датчик может быть любым, хоть контактный прерыватель. Всё зависит только от общей конфигурации датчик+процессор+коммутатор, надо инвертировать сигнал или не надо.
25000 оборотов это примерно 400 Гц, сейчас попробовал подать на вход тестовый меандр и вроде всё работает. Но нужно учитывать, что у меня максимальный угол опережения (40 градусов) достигается уже при 4000 оборотах. Поэтому нужно смотреть по месту.
На днях планирую попробовать скетч прогнатый через нейросеть, со всевозможными оптимизациями и картой углов вместо вычислений в реальном времени. На стенде он работает лучше, но на мотоцикле ещё не тестил.
Датчик может быть любым, хоть контактный прерыватель. Всё зависит только от общей конфигурации датчик+процессор+коммутатор, надо инвертировать сигнал или не надо.
25000 оборотов это примерно 400 Гц, сейчас попробовал подать на вход тестовый меандр и вроде всё работает. Но нужно учитывать, что у меня максимальный угол опережения (40 градусов) достигается уже при 4000 оборотах. Поэтому нужно смотреть по месту.
На днях планирую попробовать скетч прогнатый через нейросеть, со всевозможными оптимизациями и картой углов вместо вычислений в реальном времени. На стенде он работает лучше, но на мотоцикле ещё не тестил.
@user314, Спасибо за ответ вроде прошил мигает ! А еще вопрос, а я правильно понял если мне надо выставить начальный угол опережения скажем 60гр, на сайте https://customcult.netlify.app/ там где график в первой и ставить скажем -60 потом, 0....10....20...30, если нет а где выставляется ?
@ukr100,
Вам нужно на их сайте задать необходимые вам углы, скачать скетч и подставить в мой вариант значения из их скетча.
Ищите переменные ignitionDegree и подставляйте свои
Вам нужно на их сайте задать необходимые вам углы, скачать скетч и подставить в мой вариант значения из их скетча.
Ищите переменные ignitionDegree и подставляйте свои
C++:
if(rpm >= 0 && rpm <= 700) {
ignitionDegree = 0;
goto bailout;
}
if(rpm >= 700 && rpm <= 1000) { // 0 - 2.2
ignitionDegree = 0.007 * rpm + (-4.800);
goto bailout;
}
if(rpm >= 1000 && rpm <= 2000) { // 2.2 - 15
ignitionDegree = 0.013 * rpm + (-10.800);
goto bailout;
}
if(rpm >= 2000 && rpm <= 3000) { // 15 - 30
ignitionDegree = 0.015 * rpm + (-15.000);
goto bailout;
}
if(rpm >= 3000 && rpm <= 4000) { // 30 - 40
ignitionDegree = 0.010 * rpm + (0.000);
goto bailout;
}
if(rpm > 4000) {
ignitionDegree = 40;
} @user314, ага увидел пасиб ! А такой вопрос, я так понял у вас на максимуме 40гр, а это не занатто много, на сколько я знаю и видел по программам там 25 ну 30 максимум, причём это за 20000т об малых кубах, а на больших кубах 12...15 т.об там 20...25гр. максимум Если я правильно понял что у вас 40гр, кабы вы мотор не укотали детонацией ! это скрин из одной проги китайской
Вложения
-
 157 KB Просмотры: 18
157 KB Просмотры: 18
@ukr100,
Меряю исключительно ощущениями, мотор советский, двухтактный, ехать стал значительно бодрее, на оборотах 4000 - 5000 (его оптимальных) никаких детонаций не ощущаю, вплане, нет никаких дополнительных вибраций или странных звуков, . Можно будет попробовать меньше. Я тупо содрал график с customcult.
Если мы возьмём различную документацию к совковым двухтактным моторам, то там разбег фиксированного опережения от 2.2 - до 2.8 миллиметров.
Или, если подскажете, какой-то способ получать цифры детонации, то можно будет приделать и такой вариант.
Меряю исключительно ощущениями, мотор советский, двухтактный, ехать стал значительно бодрее, на оборотах 4000 - 5000 (его оптимальных) никаких детонаций не ощущаю, вплане, нет никаких дополнительных вибраций или странных звуков, . Можно будет попробовать меньше. Я тупо содрал график с customcult.
Если мы возьмём различную документацию к совковым двухтактным моторам, то там разбег фиксированного опережения от 2.2 - до 2.8 миллиметров.
Или, если подскажете, какой-то способ получать цифры детонации, то можно будет приделать и такой вариант.
Изменено:
@user314,Скорее всего что вы на двух тактном детонации не услышите, он очень громко работает, нет шумовки у него в виде водяной рубашки и клапанов нет, вы это поймёте когда развалится коленвал из за обратного удара, ну как вариант снять головку глянуть на поршень нет ли раковин от детонации, но для этого надо проехать прилично, можно по свече определить, но опять же надо пробег что бы был. Ну и это двух тактник, там масло, фазы так себе, горение вместе с маслом сами понимаете, определить трудно, первое что хрякнет коленвал а именно мотылёвый подшипник. А по поводу ощущений, знаете есть такая штука плацебо, ну вы же поставили компьютер, сами написали прогу, сколько намучались ) оно однозначно должно быть лучше  Только на стенде можно понять даёт это что то или нет, ну вы этот вопрос по изучайте, я как бы 30лет в спорте, ездил на электронике правда буржуйской, там максимум 25гр, найдите там у них есть инструкция полистайте https://www.power-spark.de/index_en.html
Только на стенде можно понять даёт это что то или нет, ну вы этот вопрос по изучайте, я как бы 30лет в спорте, ездил на электронике правда буржуйской, там максимум 25гр, найдите там у них есть инструкция полистайте https://www.power-spark.de/index_en.html
Только на стенде можно понять даёт это что то или нет, ну вы этот вопрос по изучайте, я как бы 30лет в спорте, ездил на электронике правда буржуйской, там максимум 25гр, найдите там у них есть инструкция полистайте https://www.power-spark.de/index_en.htmlВложения
-
 139.5 KB Просмотры: 11
139.5 KB Просмотры: 11
@ukr100,
Сравнивал путём подъёма в гору, там и без измерений стало ясно, что ФУОЗ нужен. Касательно свечи, у меня она бывает либо тёмно-красного цвета, либо чёрного, если масла многовато или качество бензина подкачало. Когда мастерил ФУОЗ ориентировался именно на цвет и удивился, что цвет красный, я такого не видел на этих моторах.
Сравнивал путём подъёма в гору, там и без измерений стало ясно, что ФУОЗ нужен. Касательно свечи, у меня она бывает либо тёмно-красного цвета, либо чёрного, если масла многовато или качество бензина подкачало. Когда мастерил ФУОЗ ориентировался именно на цвет и удивился, что цвет красный, я такого не видел на этих моторах.
@user314, Красный, потому что в бензине присадки много, воруют, присадками детонацию убирают не детонирует но и не едет, по качеству бензина навряд ли, вангую у вас камера всё равно разжата, про масло то же сказки, я лью 18% свеча после 30ти минут гонки как новая, можно в коробку и в магазин ) Если светлая то это не очень хорошо бедная смесь, для двухтактника у которого смазка в топливе плохо, в идеале светло коричневая
Что и где там я конкретно должен увидеть, там только про коммерциюТолько на стенде можно понять даёт это что то или нет, ну вы этот вопрос по изучайте, я как бы 30лет в спорте, ездил на электронике правда буржуйской, там максимум 25гр, найдите там у них есть инструкция полистайте https://www.power-spark.de/index_en.html
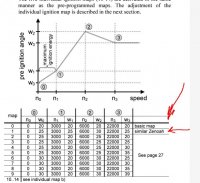
@user314, зайдите в downloads скачайте инструкцию, там есть цифры и графики
@user314, ну это крохи но для понимания обороты и угол при этих оборотах, и скорости горения хватает при таком угле, ну это так то на чём испытано, хотя увидел ваши труды аж интересно стало стенд у меня есть надо будет попробовать чё будет ))
@user314, ну это крохи но для понимания обороты и угол при этих оборотах, и скорости горения хватает при таком угле, ну это так то на чём испытано, хотя увидел ваши труды аж интересно стало стенд у меня есть надо будет попробовать чё будет ))
Вложения
-
 99.7 KB Просмотры: 9
99.7 KB Просмотры: 9
@ukr100,
Вот моя свеча, мотор проехал 7- 10 километров, глушил за 40 - 50 метров перед домом.

Ну да, черновата, но другого бензина нет, а свеча на этом бензе засерается не только у меня, проверено.
Эта свеча проехала километров эдак 150 на этом моторе, никаких странных цветов или разрушений не замечено.
Поставлю 30 градусов, возможности проверить или не верить всё равно не имеется.
Если интересно, я сейчас тестирую вот такой скетч, разумеется он заточен под мою схему из этого поста, но легко можно подправить под стандартный вариант датчик->arduino->коммутатор->КЗ:
Осциллограммы выглядят стабильнее (без "дёрганки"), здесь используется карта вместо постоянных вычислений угла и код полностью асинхронный, без задержек при выполнении цикла loop.
Вот моя свеча, мотор проехал 7- 10 километров, глушил за 40 - 50 метров перед домом.
Ну да, черновата, но другого бензина нет, а свеча на этом бензе засерается не только у меня, проверено.
Эта свеча проехала километров эдак 150 на этом моторе, никаких странных цветов или разрушений не замечено.
Поставлю 30 градусов, возможности проверить или не верить всё равно не имеется.
Если интересно, я сейчас тестирую вот такой скетч, разумеется он заточен под мою схему из этого поста, но легко можно подправить под стандартный вариант датчик->arduino->коммутатор->КЗ:
C++:
#define IN 4 // Входной пин (датчик)
#define OUT 5 // Выходной пин (катушка)
bool detector = false, oldDetector = false, advanceGranted = false;
unsigned long fuseTime, oldTime, midTime, periodTime, chargeTime, ignitionAdvance;
int ignitionDegree = 0;
long rpm = 0;
unsigned long lastActionTime = 0; // Время последнего действия
unsigned long antiChatterDelay = 0; // Задержка для антисбой (как delayMicroseconds(periodTime / 5))
unsigned long lastCoilAction = 0; // Время последнего действия с катушкой
bool antiChatterEnabled = trueутпдшырвутenasd; // Флаг для включения/выключения функции антисбой
// Структура для хранения диапазона оборотов и соответствующего угла опережения
struct RPMRange {
int minRPM;
int maxRPM;
int ignitionDegree;
};
// Карта значений для угла опережения зажигания (равномерное распределение углов от 0° до 33°)
const RPMRange rpmTable[] = {
{0, 700, 0}, // 0-700 оборотов -> 0°
{700, 800, 1}, // 700-800 оборотов -> 1°
{800, 900, 2}, // 800-900 оборотов -> 2°
{900, 1000, 3}, // 900-1000 оборотов -> 3°
{1000, 1100, 4}, // 1000-1100 оборотов -> 4°
{1100, 1200, 5}, // 1100-1200 оборотов -> 5°
{1200, 1300, 6}, // 1200-1300 оборотов -> 6°
{1300, 1400, 7}, // 1300-1400 оборотов -> 7°
{1400, 1500, 8}, // 1400-1500 оборотов -> 8°
{1500, 1600, 9}, // 1500-1600 оборотов -> 9°
{1600, 1700, 10}, // 1600-1700 оборотов -> 10°
{1700, 1800, 11}, // 1700-1800 оборотов -> 11°
{1800, 1900, 12}, // 1800-1900 оборотов -> 12°
{1900, 2000, 13}, // 1900-2000 оборотов -> 13°
{2000, 2100, 14}, // 2000-2100 оборотов -> 14°
{2100, 2200, 15}, // 2100-2200 оборотов -> 15°
{2200, 2300, 16}, // 2200-2300 оборотов -> 16°
{2300, 2400, 17}, // 2300-2400 оборотов -> 17°
{2400, 2500, 18}, // 2400-2500 оборотов -> 18°
{2500, 2600, 19}, // 2500-2600 оборотов -> 19°
{2600, 2700, 20}, // 2600-2700 оборотов -> 20°
{2700, 2800, 21}, // 2700-2800 оборотов -> 21°
{2800, 2900, 22}, // 2800-2900 оборотов -> 22°
{2900, 3000, 23}, // 2900-3000 оборотов -> 23°
{3000, 3100, 24}, // 3000-3100 оборотов -> 24°
{3100, 3200, 25}, // 3100-3200 оборотов -> 25°
{3200, 3300, 26}, // 3200-3300 оборотов -> 26°
{3300, 3400, 27}, // 3300-3400 оборотов -> 27°
{3400, 3500, 28}, // 3400-3500 оборотов -> 28°
{3500, 3600, 29}, // 3500-3600 оборотов -> 29°
{3600, 3700, 30}, // 3600-3700 оборотов -> 30°
{3700, 3800, 31}, // 3700-3800 оборотов -> 31°
{3800, 3900, 32}, // 3800-3900 оборотов -> 32°
{3900, 4000, 33}, // 3900-4000 оборотов -> 33°
{4000, 999999, 33} // 4000+ оборотов -> 33° (максимальное значение)
};
const int tableSize = sizeof(rpmTable) / sizeof(rpmTable[0]); // Количество элементов в таблице
void setup() {
pinMode(IN, INPUT); // D2 от прерывателя (датчик)
pinMode(OUT, OUTPUT); // D1 к драйверу катушки
pinMode(2, OUTPUT); // LED для визуализации
digitalWrite(2, LOW); // Выключаем LED
oldTime = micros(); // Начальное время для отсчёта
fuseTime = micros(); // Начальный отсчёт для предохранителя
}
void readAll() {
// Считываем только время для подсчёта оборотов и зарядки катушки
unsigned long newTime = micros();
periodTime = newTime - oldTime; // Время одного цикла
chargeTime = newTime - midTime; // Время зарядки катушки
rpm = 60000000 / periodTime; // Расчёт оборотов в минуту
oldTime = newTime; // Обновляем старое время для следующего цикла
}
int getIgnitionDegree(int rpm) {
// Поиск угла опережения на основе оборотов из таблицы
for (int i = 0; i < tableSize; i++) {
if (rpm >= rpmTable[i].minRPM && rpm < rpmTable[i].maxRPM) {
return rpmTable[i].ignitionDegree; // Возвращаем угол для данного диапазона оборотов
}
}
return 0; // Если обороты не входят в диапазон таблицы, возвращаем 0
}
void setIgnition() {
ignitionDegree = getIgnitionDegree(rpm); // Получаем угол из таблицы значений
ignitionAdvance = chargeTime - ((periodTime / 360) * ignitionDegree); // Угол опережение
}
void controlCoil(bool state) {
// Управление катушкой зажигания (включение/выключение)
if (state) GPOS = (1 << OUT); // Включаем катушку
else GPOC = (1 << OUT); // Отключаем катушку
}
void loop() {
detector = digitalRead(IN); // Чтение входного сигнала от датчика
// Обработка "закрытия" шторки
if (detector == HIGH && oldDetector == LOW) { // шторка закрыта
if (antiChatterEnabled) {
// Выполним действия с катушкой, если прошло нужное время и функция антисбой включена
if ((micros() - lastCoilAction) >= antiChatterDelay) {
controlCoil(false); // отключаем катушку
oldDetector = detector;
readAll(); // Подсчёт всех параметров цикла
setIgnition(); // Получение угла опережения
fuseTime = micros(); // Начало отсчёта для предохранителя
antiChatterDelay = periodTime / 5; // Установка времени для функции антисбой
lastCoilAction = micros(); // Обновляем время последнего действия
}
} else {
// Когда защита от сбоев выключена, просто отключаем катушку
controlCoil(false);
oldDetector = detector;
readAll();
setIgnition();
fuseTime = micros();
}
}
// Обработка "открытия" шторки
if (detector == LOW && oldDetector == HIGH) { // шторка открыта
if (antiChatterEnabled) {
if ((micros() - lastCoilAction) >= antiChatterDelay) {
controlCoil(true); // включаем катушку
oldDetector = detector;
midTime = micros(); // начало зарядки катушки
advanceGranted = true; // блок опережения разрешён
antiChatterDelay = periodTime / 5; // Устанавливаем время для функции антисбой
lastCoilAction = micros(); // Обновляем время последнего действия
}
} else {
// Когда защита от сбоев выключена, сразу включаем катушку
controlCoil(true);
oldDetector = detector;
midTime = micros();
advanceGranted = true; // блок опережения разрешён
}
}
// Опережение зажигания
if (micros() - midTime >= ignitionAdvance && advanceGranted) {
controlCoil(false); // Отключаем катушку
advanceGranted = false; // Блок опережения выключен
}
// Предохранитель (если катушка заряжается более 1 секунды)
if (micros() - fuseTime >= 1000000) {
controlCoil(false); // Отключаем катушку
}
}
Изменено:
@user314, судя по свече горение неправильное, такого быть недолжно, его льёт, а что за мотор или транспорт ? Там пара не подсевшая ?
Тут судя по свече может быть и детонация, топливо не горит правильно, конечно если гильза +поршень+кольца без вопросов, ну и степень сжатия правильная. К стати спрошу по путно а вот в эту ATtiny85 что то еще засунуть можно, к примеру дисплей с вольтами или оборотами, будет достаточно 2е цифры, или то и другое с переключением, или у неё памяти едва на зажигалку хватает ?Поставлю 30 градусов, возможности проверить или не верить всё равно не имеется.
И еще масло на кольце нехорошо, компрессия слабая и вам приходится лить в него топливо что бы он ехал, ну то-е вы едете не на компрессии, а на перерасходе топлива.Эта свеча проехала километров эдак 150 на этом моторе,
Вложения
-
 46.5 KB Просмотры: 1
46.5 KB Просмотры: 1
Спрашиваешь конечно интересноЕсли интересно, я сейчас тестирую вот такой скетч,
Схематически такая возможность есть https://arduinoprosto.ru/q/80290/attiny85-dht11-tm1637#gsc.tab=0К стати спрошу по путно а вот в эту ATtiny85 что то еще засунуть можно, к примеру дисплей с вольтами или оборотами, будет достаточно 2е цифры, или то и другое с переключением, или у неё памяти едва на зажигалку хватает ?
Но у меня attiny не имеется, поэтому проверить не могу, пока что.
Итак, давайте под-итожим, заодно я для себя определюсь и буду каждый раз тыкать в этот пост всех, кто будет у меня спрашивать "а как мне переделать":
Вариант самодельного коммутатора я здесь рассматривать не буду, так как видимо мало кому хочется возиться с рассыпухой.
Логика скетча: датчик "1"->"0" = искра:
Всё тоже самое, но с решением проблемы первых импульсов, когда periodTime ещё неизвестен:
Код адаптирован под любую платформу, хоть attiny, хоть arduino, хоть esp8266/32
Таблица углов опережения расписана подробно, редактируйте под себя.
Если вскорется ещё какой-то вариант - пишите, будем разбираться.
Вариант самодельного коммутатора я здесь рассматривать не буду, так как видимо мало кому хочется возиться с рассыпухой.
Логика скетча: датчик "1"->"0" = искра:
C++:
#define IN 0 // Входной пин (датчик)
#define OUT 1 // Выходной пин (катушка)
bool detector = false, oldDetector = false, advanceGranted = false;
unsigned long fuseTime, oldTime, midTime, periodTime, chargeTime, ignitionAdvance;
int ignitionDegree = 0;
long rpm = 0;
// Карта значений для угла опережения зажигания (равномерное распределение углов от 0° до 33°)
const struct {
int minRPM, maxRPM, ignitionDegree;
} rpmTable[] = {
{0, 700, 0}, // 0-700 оборотов -> 0°
{700, 800, 1}, // 700-800 оборотов -> 1°
{800, 900, 2}, // 800-900 оборотов -> 2°
{900, 1000, 3}, // 900-1000 оборотов -> 3°
{1000, 1100, 4}, // 1000-1100 оборотов -> 4°
{1100, 1200, 5}, // 1100-1200 оборотов -> 5°
{1200, 1300, 6}, // 1200-1300 оборотов -> 6°
{1300, 1400, 7}, // 1300-1400 оборотов -> 7°
{1400, 1500, 8}, // 1400-1500 оборотов -> 8°
{1500, 1600, 9}, // 1500-1600 оборотов -> 9°
{1600, 1700, 10}, // 1600-1700 оборотов -> 10°
{1700, 1800, 11}, // 1700-1800 оборотов -> 11°
{1800, 1900, 12}, // 1800-1900 оборотов -> 12°
{1900, 2000, 13}, // 1900-2000 оборотов -> 13°
{2000, 2100, 14}, // 2000-2100 оборотов -> 14°
{2100, 2200, 15}, // 2100-2200 оборотов -> 15°
{2200, 2300, 16}, // 2200-2300 оборотов -> 16°
{2300, 2400, 17}, // 2300-2400 оборотов -> 17°
{2400, 2500, 18}, // 2400-2500 оборотов -> 18°
{2500, 2600, 19}, // 2500-2600 оборотов -> 19°
{2600, 2700, 20}, // 2600-2700 оборотов -> 20°
{2700, 2800, 21}, // 2700-2800 оборотов -> 21°
{2800, 2900, 22}, // 2800-2900 оборотов -> 22°
{2900, 3000, 23}, // 2900-3000 оборотов -> 23°
{3000, 3100, 24}, // 3000-3100 оборотов -> 24°
{3100, 3200, 25}, // 3100-3200 оборотов -> 25°
{3200, 3300, 26}, // 3200-3300 оборотов -> 26°
{3300, 3400, 27}, // 3300-3400 оборотов -> 27°
{3400, 3500, 28}, // 3400-3500 оборотов -> 28°
{3500, 3600, 29}, // 3500-3600 оборотов -> 29°
{3600, 3700, 30}, // 3600-3700 оборотов -> 30°
{3700, 3800, 31}, // 3700-3800 оборотов -> 31°
{3800, 3900, 32}, // 3800-3900 оборотов -> 32°
{3900, 4000, 33}, // 3900-4000 оборотов -> 33°
{4000, 999999, 33} // 4000+ оборотов -> 33° (максимальное значение)
};
void setup() {
pinMode(IN, INPUT); // от датчика
pinMode(OUT, OUTPUT); // к коммутатору
oldTime = micros(); // Начальное время для отсчёта
fuseTime = micros(); // Начальный отсчёт для предохранителя
}
void readAll() {
// Считываем только время для подсчёта оборотов и зарядки катушки
unsigned long newTime = micros();
periodTime = newTime - oldTime; // Время одного цикла
chargeTime = newTime - midTime; // Время зарядки катушки
rpm = 60000000 / periodTime; // Расчёт оборотов в минуту
oldTime = newTime; // Обновляем старое время для следующего цикла
}
int getIgnitionDegree(long rpm) {
// Поиск угла опережения на основе оборотов из таблицы
for (int i = 0; i < sizeof(rpmTable) / sizeof(rpmTable[0]); ++i) {
if (rpm >= rpmTable[i].minRPM && rpm < rpmTable[i].maxRPM) {
return rpmTable[i].ignitionDegree; // Возвращаем угол для данного диапазона оборотов
}
}
return 0; // Если обороты не входят в диапазон таблицы, возвращаем 0
}
void setIgnition() {
ignitionDegree = getIgnitionDegree(rpm); // Получаем угол из таблицы значений
ignitionAdvance = chargeTime - ((periodTime / 360) * ignitionDegree); // Угол опережение
}
void controlCommutator(bool state) {
// Управление коммутатором
if (state) digitalWrite(OUT, HIGH);
else digitalWrite(OUT, LOW);
}
void loop() {
detector = digitalRead(IN); // Чтение входного сигнала от датчика
// Обработка шторки
if (detector == LOW && oldDetector == HIGH) {
controlCommutator(false);
oldDetector = detector;
readAll();
setIgnition();
// delayMicroseconds(periodTime/5); // если при открытии заслонки мотор душится, то нужно раскомментировать эту строку
}
// Обработка шторки
if (detector == HIGH && oldDetector == LOW) {
controlCommutator(true);
oldDetector = detector;
midTime = micros();
fuseTime = micros();
advanceGranted = true; // блок опережения разрешён
// delayMicroseconds(periodTime/5); // если при открытии заслонки мотор душится, то нужно раскомментировать эту строку
}
// Опережение зажигания
if (micros() - midTime >= ignitionAdvance && advanceGranted) {
controlCommutator(false);
advanceGranted = false; // Блок опережения выключен
}
// Предохранитель (если катушка заряжается более 1 секунды)
if (micros() - fuseTime >= 1000000) {
controlCommutator(false);
}
}
C-like:
#define IN 0 // Входной пин (датчик)
#define OUT 1 // Выходной пин (катушка)
const int SKIP = 5;
const long FUSE_TIMER = 1000000; // 1 секунда в микросекундах
// Переменные для логики зажигания
bool detector = false, // Текущее состояние датчика положения (шторка открыта/закрыта)
oldDetector = false, // Предыдущее состояние датчика положения
advanceGranted = false; // Флаг, разрешающий выполнение опережения зажигания
// Переменные для расчёта времени в микросекундах
unsigned long fuseTime = 0, // Программный предохранитель: время, через которое катушка отключается для защиты
oldTime = 0, // Время предыдущего цикла (для расчёта периода)
midTime = 0, // Время начала зарядки катушки
periodTime = 0, // Период одного полного оборота вала двигателя
chargeTime = 0, // Время, в течение которого катушка заряжается
ignitionAdvance = 0, // Время опережения зажигания (вычисляется на основе оборотов rpm)
rpm = 0; // Текущие обороты двигателя (об/мин)
int ignitionDegree = 0, // Угол опережения зажигания в градусах
pwmValue = 255, // ШИМ чтобы плавно отключать катушку в секции программного предохранителя
skipImpulses = 0;
// Карта значений для угла опережения зажигания (равномерное распределение углов от 0° до 33°)
const struct {
int minRPM, maxRPM, ignitionDegree;
} rpmTable[] = {
{0, 700, 0}, // 0-700 оборотов -> 0°
{700, 800, 1}, // 700-800 оборотов -> 1°
{800, 900, 2}, // 800-900 оборотов -> 2°
{900, 1000, 3}, // 900-1000 оборотов -> 3°
{1000, 1100, 4}, // 1000-1100 оборотов -> 4°
{1100, 1200, 5}, // 1100-1200 оборотов -> 5°
{1200, 1300, 6}, // 1200-1300 оборотов -> 6°
{1300, 1400, 7}, // 1300-1400 оборотов -> 7°
{1400, 1500, 8}, // 1400-1500 оборотов -> 8°
{1500, 1600, 9}, // 1500-1600 оборотов -> 9°
{1600, 1700, 10}, // 1600-1700 оборотов -> 10°
{1700, 1800, 11}, // 1700-1800 оборотов -> 11°
{1800, 1900, 12}, // 1800-1900 оборотов -> 12°
{1900, 2000, 13}, // 1900-2000 оборотов -> 13°
{2000, 2100, 14}, // 2000-2100 оборотов -> 14°
{2100, 2200, 15}, // 2100-2200 оборотов -> 15°
{2200, 2300, 16}, // 2200-2300 оборотов -> 16°
{2300, 2400, 17}, // 2300-2400 оборотов -> 17°
{2400, 2500, 18}, // 2400-2500 оборотов -> 18°
{2500, 2600, 19}, // 2500-2600 оборотов -> 19°
{2600, 2700, 20}, // 2600-2700 оборотов -> 20°
{2700, 2800, 21}, // 2700-2800 оборотов -> 21°
{2800, 2900, 22}, // 2800-2900 оборотов -> 22°
{2900, 3000, 23}, // 2900-3000 оборотов -> 23°
{3000, 3100, 24}, // 3000-3100 оборотов -> 24°
{3100, 3200, 25}, // 3100-3200 оборотов -> 25°
{3200, 3300, 26}, // 3200-3300 оборотов -> 26°
{3300, 3400, 27}, // 3300-3400 оборотов -> 27°
{3400, 3500, 28}, // 3400-3500 оборотов -> 28°
{3500, 3600, 29}, // 3500-3600 оборотов -> 29°
{3600, 3700, 30}, // 3600-3700 оборотов -> 30°
{3700, 3800, 31}, // 3700-3800 оборотов -> 31°
{3800, 3900, 32}, // 3800-3900 оборотов -> 32°
{3900, 4000, 33}, // 3900-4000 оборотов -> 33°
{4000, 999999, 33} // 4000+ оборотов -> 33° (максимальное значение)
};
void setup() {
pinMode(IN, INPUT); // от датчика
pinMode(OUT, OUTPUT); // к коммутатору
oldTime = micros(); // Начальное время для отсчёта
fuseTime = micros(); // Начальный отсчёт для предохранителя
}
void readAll() {
// Считываем только время для подсчёта оборотов и зарядки катушки
unsigned long newTime = micros();
periodTime = newTime - oldTime; // Время одного цикла
chargeTime = newTime - midTime; // Время зарядки катушки
rpm = 60000000 / periodTime; // Расчёт оборотов в минуту
oldTime = newTime; // Обновляем старое время для следующего цикла
}
int getIgnitionDegree(long rpm) {
// Поиск угла опережения на основе оборотов из таблицы
for (int i = 0; i < sizeof(rpmTable) / sizeof(rpmTable[0]); ++i) {
if (rpm >= rpmTable[i].minRPM && rpm < rpmTable[i].maxRPM) {
return rpmTable[i].ignitionDegree; // Возвращаем угол для данного диапазона оборотов
}
}
return 0; // Если обороты не входят в диапазон таблицы, возвращаем 0
}
void setIgnition() {
ignitionDegree = getIgnitionDegree(rpm); // Получаем угол из таблицы значений
ignitionAdvance = chargeTime - ((periodTime / 360) * ignitionDegree); // Угол опережение
}
void controlCommutator(bool state) {
// Управление коммутатором
if (state) digitalWrite(OUT, HIGH);
else digitalWrite(OUT, LOW);
}
void loop() {
detector = digitalRead(IN); // Чтение входного сигнала от датчика
// Обработка шторки
if (detector == LOW && oldDetector == HIGH) {
controlCommutator(false);
oldDetector = detector; // Обновляем предыдущее состояние датчика
readAll(); // Считываем параметры цикла
if (skipImpulses < SKIP) {
skipImpulses++;
return; // Пропускаем обработку до следующего импульса
}
setIgnition(); // Установка угла опережения
delayMicroseconds(periodTime/5); // Задержка
return; //
}
// Обработка шторки
if (detector == HIGH && oldDetector == LOW) {
controlCommutator(true);
oldDetector = detector; // Обновляем предыдущее состояние датчика
midTime = micros(); // Фиксируем время начала зарядки
fuseTime = micros(); // Обновляем время для программного предохранителя
if (skipImpulses < SKIP) {
return; // Пропускаем обработку первого импульса
}
advanceGranted = true; // Разрешаем выполнять опережение зажигания
delayMicroseconds(periodTime/5); // Задержка
return; //
}
// Опережение зажигания
if (micros() - midTime >= ignitionAdvance && advanceGranted) {
controlCommutator(false); // Выключаем катушку (разряд для искры)
advanceGranted = false; // Сбрасываем флаг опережения
}
// Контроль длительности зарядки катушки (не более 1 секунды)
if (micros() - fuseTime >= FUSE_TIMER) {
// Постепенно уменьшаем значение ШИМ для плавного выключения катушки
if (pwmValue > 0) {
pwmValue--; // Уменьшаем скважность на 1 каждый цикл
analogWrite(OUT, pwmValue); // Обновляем ШИМ
} else {
// Когда pwmValue достигает 0, катушка полностью выключена
controlCommutator(false); // Дополнительно подтверждаем, что катушка выключена
}
skipImpulses = 0; // переход в режим предстарта
}
}Таблица углов опережения расписана подробно, редактируйте под себя.
Если вскорется ещё какой-то вариант - пишите, будем разбираться.
Изменено:
@user314, разрешите предложить пару моментов для оптимизации кода?
1. Можно объявить структуру и сразу ее инициализировать, примерно так:
2. Для поиска нужного значения в структуре можно использовать так называемый range-based for loop, т. е. диапазонный цикл
В этом случае не нужно думать о длине массива, переменных индексации и конца массива, поэтому на следующей строчке можно сэкономить и освободить немного памяти:
Итерация по массиву происходит автоматически от первого элемента к последнему (что также является недостатком для этого метода в некоторых ситуациях, так как значения массива нельзя просмотреть в обратном или выборочном порядке, но в этом случае это не требуется)
1. Можно объявить структуру и сразу ее инициализировать, примерно так:
структура:
// Карта значений для угла опережения зажигания
const struct {
int minRPM, maxRPM, ignitionDegree;
} rpmTable[] = {
{0, 700, 0}, {700, 800, 1}, // и т. д.
};
C++:
int getIgnitionDegree(long rpm) {
for (const int& range : rpmTable) {
if (rpm >= range.minRPM && rpm < range.maxRPM) {
return range.ignitionDegree;
}
}
//return 0; //здесь можно вернуть 0, если ничего не найдется
}
C++:
const int tableSize = sizeof(rpmTable) / sizeof(rpmTable[0]); // Эта строка уже не потребуется
Поделиться: