СИСТЕМА ИНТЕРФЕЙСА МУЛЬТИПЛЕКСНОЙ ШИНЫ И СПОСОБ ПЕРЕДАЧИ И ПРИЕМА ПИТАНИЯ И ДАННЫХ
ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННОЕ ПРИЛОЖЕНИЕ
Эта заявка включает в себя посредством ссылки и требует приоритета предварительной заявки Ser. № 60/169,575 для «EPLEX MULTIPLEX BUS», дата подачи заявки 8 декабря 1999 г. и совместное владение с настоящей заявкой.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к управлению и мониторингу мультиплексированных сетей связи и, более конкретно, к мультиплексированию передачи данных и энергии по одному проводнику общей шины.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В качестве примера известны различные системы для передачи данных, создаваемых большим числом абонентов, из одного места в другое, как описано в патенте США No. № 4059729 на имя Eddy et al. Обычно мультиплексирование с временным разделением используется для объединения данных в мультиплексированный поток данных и их передачи по сети передачи, включая телефонные линии, радиопередающее оборудование и т.п. Как дополнительно проиллюстрировано в качестве примера, шины между периферийными устройствами и центральным управляющим устройством передают данные для управления информацией в виде импульсных данных по различным желательным токопроводящим путям, как описано в патенте США No. № 4105871 на имя Ely et al. Такие системы мультиплексирования и системы, известные в данной области техники, обычно требуют отдельных проводов для питания, синхронизации тактовых импульсов и данных. Другие методы передачи данных с питанием требуют использования радиочастотной несущей, что требует сложной фильтрации и схемотехники для модуляции и демодуляции данных.
Кроме того, хорошо известно, что количество устройств, которые обычно могут быть подключены к мультиплексной шине, нежелательно ограничено.
Необходимо обеспечить мультиплексную шинную систему передачи и приема данных с минимальным количеством компонентов, что резко удешевит мультиплексную систему. Кроме того, существует потребность в такой системе, которая будет поддерживать многие сотни приемопередатчиков для связи с устройствами ввода и вывода.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
С учетом предшествующего уровня техники целью настоящего изобретения является обеспечение мультиплексирования данных и мощности для приемопередатчиков, обменивающихся данными по общей шине. Кроме того, целью изобретения является создание такой системы мультиплексирования, в которой используется минимум компонентов для снижения стоимости по сравнению с системами, обеспечивающими типичные функции мультиплексирования.
Эти и другие цели, преимущества и признаки настоящего изобретения обеспечиваются системой связи и управления, содержащей шину, имеющую сигнальный провод, приемопередатчик, электрически соединенный с шиной для передачи и приема электрического сигнала по сигнальному проводу, и процессор. может работать с шиной для управления питанием и данными, доставляемыми на нее. Контроллер подает электрический сигнал на приемопередатчик по сигнальному проводу в виде импульсного сигнала, имеющего множество импульсов напряжения, разделенных временным интервалом, при этом мощность подается с каждым импульсом напряжения и отсутствует в течение временного интервала. Кроме того, контроллер передает данные в приемопередатчик посредством широтно-импульсной модуляции импульсного сигнала, при этом приемопередатчик передает данные на сигнальный провод шины в течение временного интервала в виде логического бита для чтения контроллером. В результате данные передаются на приемопередатчик 5 и принимаются от приемопередатчика по одному сигнальному проводу шины, по которому подается питание для приемопередатчика.
Аспект способа изобретения включает в себя связь и управление системой через один проводник путем подачи питания на один проводник в виде волны напряжения, имеющей импульсное рабочее напряжение, разделенное временным интервалом, в котором питание не подается на шину в течение времени. слот, широтно-импульсная модуляция формы волны таким образом, что первая длительность импульса представляет собой логическую единицу, а вторая длительность импульса представляет собой логический ноль, и подключение приемопередатчика к одному проводнику для получения от него формы сигнала напряжения для его питания и получения от него данных - . Данные от приемопередатчика передаются в течение временного интервала в виде логического бита. В результате широтно-импульсная модуляция формы сигнала передает данные на приемопередатчик, а логические битовые данные, передаваемые приемопередатчиком в пределах временного интервала, могут быть получены от приемопередатчика, причем каждый передается через единственный проводник, по которому питание подается на приемопередатчик. .
В одном варианте осуществления ширина импульса мощности сравнивается с шириной временного интервала, при этом ширина импульса мощности, равная ширине временного интервала, представляет значение первого логического бита, а ширина импульса мощности, не равная ширине временного интервала, представляет значение второго логического бита. Кроме того, передача и прием данных выполняются путем передачи многобитовой схемы, в которой один младший бит указывает начальный бит, передачи множества битов данных, следующих за начальным битом, и передачи последнего бита, представляющего один из битов данных. и адресный бит.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Один вариант осуществления изобретения, а также альтернативные варианты осуществления описаны в качестве примера со ссылкой на прилагаемые чертежи, на которых:
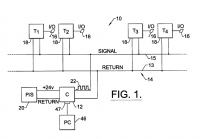
FIG. 1 представляет собой блок-схему системы, иллюстрирующую один вариант осуществления настоящего изобретения;
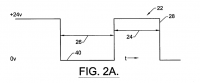
FIG. 2А представляет собой форму волны напряжения, иллюстрирующую временной интервал между импульсами напряжения, при этом временной интервал не отвечает приемопередатчику;

FIG. 2B представляет собой форму волны напряжения, иллюстрирующую временной интервал между импульсами напряжения, при этом временной интервал включает в себя сигнал, представляющий логическую единицу, как ответ от приемопередатчика;
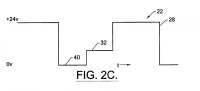
FIG. 2C представляет собой форму волны напряжения, иллюстрирующую временной интервал между импульсами напряжения, при этом временной интервал включает в себя сигнал, представляющий логический ноль, как ответ от приемопередатчика;
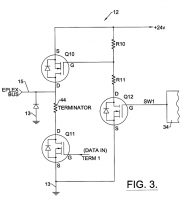
FIG. 3 представляет собой частичную схематическую диаграмму, иллюстрирующую один вариант осуществления части контроллера переключения питания и схемы согласования, работающей как модуль синхронизации с системой, показанной на фиг. 1;
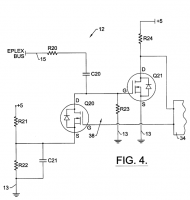
FIG. 4 представляет собой частичную схематическую диаграмму, иллюстрирующую один вариант осуществления части схемы приемника и детектора контроллера, функционирующей как модуль часов на фиг. 3;
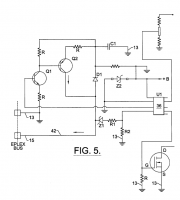
FIG. 5 представляет собой частичную схематическую диаграмму, иллюстрирующую один вариант осуществления приемопередатчика, работающего с системой, показанной на фиг. 1;
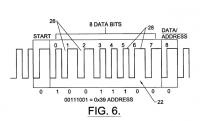
FIG. 6 представляет собой битовый поток, иллюстрирующий передаваемый байт во время работы в режиме данных варианта осуществления по фиг. 1;
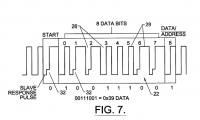
FIG. 7 представляет собой битовый поток, иллюстрирующий принятый байт во время работы в режиме данных варианта осуществления по фиг. 1;
FIG. 8 представляет собой частичное схематическое изображение типичной системы контроля и управления для двигателя и генератора, работающих с моторной лодкой;
FIG. 9 представляет собой частичное схематическое изображение типичной системы контроля и управления, использующей полупроводниковую технологию и преобразователи сигналов для двигателя и генератора, работающих с моторной лодкой; и
FIG. 10 представляет собой частичный схематический вид одного варианта осуществления настоящего изобретения, иллюстрирующий одно использование настоящего изобретения для контроля работы двигателя и генератора, работающих с моторной лодкой.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Далее настоящее изобретение будет описано более полно со ссылкой на прилагаемые чертежи, на которых показаны предпочтительные варианты осуществления изобретения. Однако это изобретение может быть реализовано во многих различных формах, и его не следует рассматривать как ограниченное вариантами осуществления, изложенными в настоящем документе. Скорее, эти варианты осуществления предоставлены для того, чтобы это раскрытие было исчерпывающим и полным и полностью передало объем изобретения специалистам в данной области техники. Подобные числа относятся к одинаковым элементам повсюду.
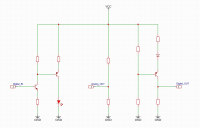
Сначала со ссылкой на фиг. 1, один вариант осуществления настоящего изобретения описывается здесь как система 10 связи и управления, включающая в себя контроллер 12, который обеспечивает интерфейс мультиплексной шины для обеспечения возможности передачи и приема энергии и данных по двухпроводной шине 14 с использованием только одного сигнальный провод 15, второй - обратный провод 13 и т.п. Устройства 16 ввода и вывода, как будет описано позже в этом описании в качестве примера, работают с приемопередатчиками 18, подключенными к шине 14, для связи друг с другом путем размещения своих данных на шине в заранее выбранное время, управляемое контроллером 12. который для описанного здесь варианта осуществления настоящего изобретения работает как модуль синхронизации, который передает данные на все приемопередатчики 18, подключенные к шине 14. Продолжая ссылаться на фиг. 1, питание подается на шину 14 с помощью источника 20 питания, который подключен к контроллеру 12, который управляет мощностью, подаваемой на шину 14 и, таким образом, на приемопередатчик 18 через импульсную форму волны мощности 22, как показано со ссылкой на фиг. . 2А. Как будет более подробно описано далее в этом разделе, данные подаются на приемопередатчики 18 контроллером 12 посредством широтно-импульсной 24 модуляции импульсного сигнала 22. Данные инициируются в приемопередатчике 18 либо устройством ввода/вывода 16, либо быть запрограммирована внутри, передается в течение временного интервала 26 между импульсами 28 сигнала 22 как логическая единица и нулевые биты 30, 32 соответственно, как показано со ссылкой на фиг. 2В и 2С. Целостность данных проверяется инициирующим входным приемопередатчиком, и в конце цикла вещания сообщается об ошибках. Выходные приемопередатчики используют данные в соответствии с устройством и состоянием, которое контролируется или контролируется.
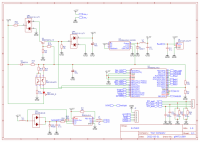
В качестве примера и со ссылкой на фиг. 3-5, теперь будет описан один вариант осуществления контроллера 12 и приемопередатчика 18, зная, что специалист в данной области техники поймет, что теперь возможны альтернативные варианты осуществления, использующие преимущества настоящего изобретения. Двухпроводная шина 14, описанная в качестве примера снова со ссылкой на фиг. 1, подает питание от контроллера 12, выступающего в качестве ведущего, к приемопередатчику 18, выступающему в качестве подчиненного. Процессор 34 контроллера 12, показанный со ссылкой на фиг. 3 и 4, поскольку микропроцессор, посредством описанного здесь примера, включает переключатель MOSFET Q12, уровень которого преобразуется во включение Q10, что, в свою очередь, включает питание шины 14. Таким образом, контроллер 12 содержит переключатель питания, включающий в себя первый полупроводниковый переключатель, служащий для подачи питания на шину, и второй полупроводниковый переключатель, служащий для управления длительностью импульса напряжения 28, формирующего форму сигнала 22 мощности. Как будет понятно специалистам в данной области техники, обрабатывающий элемент может быть микропроцессор, описанный здесь в качестве примера, или матрица логических элементов, дискретная логика и т.п. для обеспечения средств обработки, не выходя за рамки изобретения.
Продолжая ссылаться на фиг. 3, микропроцессор 34 удерживает Q11 в выключенном состоянии, пока на шину 14 подается питание. Как показано со ссылкой на фиг. 5 приемопередатчики 18 питаются током, протекающим через диод D1, который заряжает накопительный конденсатор C1. Питание распределяется на микропроцессор 36 приемопередатчика 18 и на схему передатчика тока Q1 и Q2 приемопередатчика. Как только питание будет установлено, контроллер 12 начнет создавать временные интервалы 26, описанные ранее со ссылкой на фиг. 2А-2С, в которых данные в виде логических битов 30, 32, например, от приемопередатчика 18 к контроллеру 12. В течение временного интервала 26 питание на шину 14 не подается. Приемопередатчики 18, как здесь описано например, питаются от накопленного заряда в конденсаторе С1, показанном на фиг. 5, когда создаются временные интервалы 26.
Во время работы и снова со ссылкой на фиг. 3-5 временной интервал 26 создается посредством следующих событий. Контроллер выключает Q12 и Q10 и включает Q11 для завершения шины 14. Время задержки позволяет незавершенным концам шины 14 отражаться обратно в контроллер 12. Контроллер выдает импульсный сигнал фиксации восстановления постоянного тока 38 от Q20 (см. фиг. 4), который устанавливает форму волны 22 в заданную опорную точку 40, как показано снова со ссылкой на фиг. 2А—2С. Это обеспечивает известный пороговый уровень для Q21, номинально намного меньший, чем подаваемое напряжение импульса, выдающего мощность. Контроллер 12 по существу развязывает входящие токи утечки данных, развязывая их с переменным током и восстанавливая постоянный ток с помощью ограничителя. Обращаясь снова к фиг. 5, используя транзисторы Q1 и Q2, приемопередатчик 18 подает регулируемый импульсный сигнал 42 тока на шину 14 и на согласующий резистор 44 контроллера 12 (см. фиг. 3). Ток через согласующий резистор 44 создает форму волны напряжения, которая определяется Q21 и отправляется на микропроцессор 34 контроллера 12 в виде бита данных, логической единицы 30 или логического нуля 32, описанного ранее со ссылкой на фиг. 2В и 2С. Например, импульс тока 42, установленный приемопередатчиком 18, является широтно-импульсной модуляцией, так что импульс 1/4 временного интервала 26 равен логической единице 30, а импульс равен 1/2 временного интервала, или до конца временного интервала равно логическому нулю. Таким образом, контроллер 12 может определить, когда приемопередатчик 18 не отвечает. Как показано здесь, данные вставляются после фиксации, как описано ранее. Кроме того, специалистам в данной области техники будет понятно, что несколько битов могут быть вставлены в предварительно выбранный временной интервал по желанию пользователя и для выполнения необходимой функции.
Конец временного интервала 26 создается после предварительно выбранного периода временного интервала. Контроллер 12 включает транзисторы Q12 и Q10, которые затем подают питание на шину 14. Q11 выключается для удаления терминатора 44 из шины 14.
В качестве примера в отношении работы варианта осуществления, описанного здесь для настоящего изобретения, режим работы данных идентифицируется и используется для связи с выбранным приемопередатчиком 18 для доступа к приемопередатчику и программирования его функции. Каждый из приемопередатчиков 18 «ищет» байты команд и видит байты как биты с широтно-импульсной модуляцией для запуска потока данных. Например, перепрограммирование адресов приемопередатчика может выполняться в режиме данных. Режим данных готовит трансивер к прослушиванию контроллера. Как здесь описано в качестве примера, в режиме данных используется десятибитная схема передачи с одним младшим битом, указывающим начальный бит, как показано со ссылкой на фиг. 6. Восемь битов, которые следуют за стартовым битом, представляют собой биты данных, определяющие байт, и сначала отправляются младшие биты. Девятый бит используется для различения байтов данных и байтов адреса. Например, байты адреса обозначаются младшим девятым битом, а байты данных обозначаются старшим девятым битом. Обращаясь снова к фиг. 1, компьютер 46 может обмениваться данными с контроллером 12 для обеспечения функций инициализации программирования и мониторинга, например. Контроллер 12 включает в себя коммуникационный порт 47, такой как порт RS-232, для взаимодействия с компьютером 46. Как будет понятно специалистам в данной области техники, любой из множества коммуникационных каналов, таких как соединения USB или Ethernet, может быть используется для взаимодействия с компьютером 46. Для варианта осуществления изобретения, описанного здесь в качестве примера, коммуникационный порт контроллера обычно работает на скорости 38400 бод. Любой байт, отправленный с компьютера 46 на контроллер 12, будет передан на шину 14 для чтения приемопередатчиком 18. Любой байт, как показано со ссылкой на фиг. 7, полученные от приемопередатчика 18, будут переданы контроллером 12 на компьютер 46.
Другой режим работы включает в себя мультиплексный режим, потоковый режим, когда контроллер 12 отправляет команду мультиплексирования, за которой следует поток импульсов мощности 28 и временные интервалы 26, как описано ранее со ссылкой на фиг. 2А—2С. Каждому приемопередатчику 18 дается обозначенная позиция временного интервала с предварительно запрограммированным количеством временных интервалов. Контроллер 12 повторяет данные, которые он считывает из временного интервала, при следующем поступлении импульса мощности, чтобы позволить любому приемопередатчику в системе 10 использовать передаваемые данные. В конце потока данных или в конце цикла вещания система возвращается в ранее описанный режим данных и ожидает следующей команды мультиплексирования.
Таким образом, система 10 обеспечивает полнодуплексную работу с двунаправленной связью между контроллером и приемопередатчиками, то есть устройствами ввода/вывода. Например, целостность данных может быть проверена инициирующим входным приемопередатчиком, об ошибках сообщается в конце цикла широковещательной передачи, а выходной приемопередатчик может затем использовать данные в соответствии с устройством и контролируемым или контролируемым состоянием. Таким образом, контроллер 12 осуществляет широковещательную передачу данных как в режиме передачи данных, так и в мультиплексном режиме работы. Контроллер 12 генерирует поток с широтно-импульсной модуляцией путем последовательного применения импульса мощности, а затем временного интервала, как описано ранее. Приемопередатчик 18 считывает битовую информацию с шины 14, сравнивая длину временного интервала 26 с длительностью импульса мощности 28. Контроллер 12 будет изменять продолжительность времени включения, чтобы обеспечить различные битовые значения. Например, если два импульса имеют одинаковую длину, считывается значение старшего бита. Если импульс мощности в 1,5-2,3 раза длиннее временного интервала, в качестве дополнительного примера считывается значение младшего бита. В качестве дополнительного примера, если ширина импульса мощности равна ширине временного интервала, будет интерпретировано значение первого логического бита, такое как единица, а если ширина импульса мощности не равна ширине временного интервала, второе значение логического бита, такое как ноль, будет интерпретировано.
Приемопередатчик 18 передает на контроллер 12 путем подачи импульса тока на шину 14 в течение интервалов временного интервала 26, который прозрачен для других приемопередатчиков в системе, но может быть прочитан схемой контроллера 12. снова на фиг. 5, иллюстрирующий схему приемопередатчика, стабилитрон Z1 и резисторы RI и R2 обеспечивают элементы схемы для этой функции.
Стабилитрон выбран таким образом, что он не проводит, когда приемопередатчик 18 передает на шину 14, но проводит во время импульсов мощности 28. Резисторы RI и R2 масштабируют импульс мощности до соответствующего входного уровня для микропроцессора 36.
В качестве примера рассмотрим использование настоящего изобретения на морском судне 48 для управления и контроля электрического оборудования на борту, как описано здесь со ссылкой на фиг. 8-10. Система 10, описанная выше, может быть использована для управления генераторными установками, системой безопасности, мультимедиа, гидролокатором, освещением и для мониторинга данных GPS и двигателя, например. Как показано в качестве примера со ссылкой на фиг. 8, морские органы управления обычно эволюционировали от простых механических органов управления двигателем до проводов и переключателей 49, при этом каждое устройство имело отдельный набор органов управления и проводки. По мере того, как на судно добавлялось больше систем, пучки проводки становились все более громоздкими. Помимо высокой стоимости добавления или изменения системы, некоторые элементы управления не могли быть добавлены из-за ограниченного доступа. С развитием электроники управление и контроль стали более сложными, как показано со ссылкой на фиг. 9, но проблемы с пропускной способностью и протоколами означают медленную связь и ограниченное количество устройств в системе мониторинга и управления. Как правило, отсутствие совместимости между множеством устройств, используемых на судне, требует использования преобразователей 50. Кроме того, программируемый логический контроллер (ПЛК) 51, используемый с системой, должен располагаться в центре, поскольку от каждой функции управления к ПЛК должны быть проложены отдельные провода. . Как известно в данной области техники, такие системы и установка системы являются дорогостоящими и лишь частично уменьшают количество необходимой проводки по сравнению с системами, описанными ранее со ссылкой на фиг. 8. По сравнению с настоящим изобретением одна система 10 может быть присоединена к одному двигателю для контроля важных функций этого двигателя, таких как температура, давление, число оборотов в минуту и т.п. Несколько сотен устройств могут быть подключены к одной системе 10 для управления и контроля интересующего оборудования, такого как двигатель 52 или генераторная установка 54, как показано только в качестве примера со ссылкой на фиг. 10, и без необходимости в дополнительных преобразователях, датчиках или реле, как это принято в технике. Кроме того, система 10 будет работать даже в случае «зависания» компьютера 46.
Следует понимать, что даже несмотря на то, что многочисленные характеристики и преимущества настоящего изобретения были изложены в предшествующем описании вместе с деталями структуры и функции изобретения, раскрытие носит только иллюстративный характер, и в него могут быть внесены изменения в деталях. , особенно в вопросах формы, размера и расположения частей в пределах принципов изобретения в полной мере, указанной широким общим значением терминов, в которых выражена прилагаемая формула изобретения.

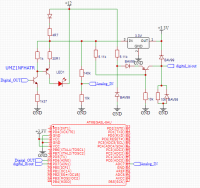
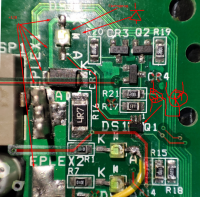
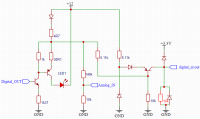 Не могу понять с чем это есть? С одной стороны похоже на токовою петлю, но питание осуществляется от шины самой петли, а тут потребление должно быть меньше 4мА, но атмега + 10 светодиодов + еще электролюминесцентная подсветка явно больше 4мА. И потом по входу аналоговому, делитель на 15 стоит и что бы получить 20мА нужно напряжение вольт 200.
Не могу понять с чем это есть? С одной стороны похоже на токовою петлю, но питание осуществляется от шины самой петли, а тут потребление должно быть меньше 4мА, но атмега + 10 светодиодов + еще электролюминесцентная подсветка явно больше 4мА. И потом по входу аналоговому, делитель на 15 стоит и что бы получить 20мА нужно напряжение вольт 200.
 Ну, успехов.
Ну, успехов.