
Всем привет!
Уже не первый год занимаюсь разработкой модели танка (т-34-85) на 3д принтере в масштабе 1:12. На данный момент готова вся механика, электроника, в общем, все работает, как и задумывалось, после сотен часов времени, раздумий, нервов и т.п. Что осталось? Сейчас часть корпуса и разных деталей даже обработаны, отшпаклеваны и покрашены, осталась обработка и покраска оставшихся частей, покрытие матовым лаком, сборка, различные косметические настройки и печать мелких деталек, ну и небольшая настройка электроники. Танк я моделировал сам по существующим чертежам в Fusion 360, детали печатал на сильно переделанной дельте Anycubic Kossel Linear Plus. Все механизмы проектировал самостоятельно, большинство из них уже не первой, и даже не третьей ревизии. Управление проектировал на основе ардуино, с базовыми подсказками из видео на каналах Гайвера и Э+М, чем им бесконечно благодарен.
Небольшой обзор танка и его главных механизмов:
Как вы поняли, я задействовал ардуино нано по максимуму, хотя хотелось бы, конечно, еще добавить, например, парогенератор для имитации выхлопных газов, а также динамик со звуками работы дизельного двигателя.
Есть мысль доделать плату до состояния не конструктора, а полностью готового устройства с хорошо спроектированной платой, где на борту будет все это в единой плоскости, возможно даже в SMD исполнении (когда я немного потренируюсь с этим).
Уже не первый год занимаюсь разработкой модели танка (т-34-85) на 3д принтере в масштабе 1:12. На данный момент готова вся механика, электроника, в общем, все работает, как и задумывалось, после сотен часов времени, раздумий, нервов и т.п. Что осталось? Сейчас часть корпуса и разных деталей даже обработаны, отшпаклеваны и покрашены, осталась обработка и покраска оставшихся частей, покрытие матовым лаком, сборка, различные косметические настройки и печать мелких деталек, ну и небольшая настройка электроники. Танк я моделировал сам по существующим чертежам в Fusion 360, детали печатал на сильно переделанной дельте Anycubic Kossel Linear Plus. Все механизмы проектировал самостоятельно, большинство из них уже не первой, и даже не третьей ревизии. Управление проектировал на основе ардуино, с базовыми подсказками из видео на каналах Гайвера и Э+М, чем им бесконечно благодарен.
Небольшой обзор танка и его главных механизмов:
- Танк по меркам игрушки большой и тяжелый (около 5 кг в сборе, а может даже больше, давно взвешивал)
- Корпус напечатан десятками деталей, которые системой шип-паз склеены эпоксидкой намертво. На данный момент частично окрашен и подготовлен к финишной обработке и сборке

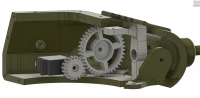
- Умеет ездить, поворачивать, разворачиваться. Скорость регулируется степенью отклонения стиков на плате пульта-передатчика. В качестве главных моторов используются переделанные мотор-редукторы с али (Bringsmart).


Комплектные моторы 270 класса заменены на RS390. Характеристики мотор-редукторов: 12V, 0.6А в холостом ходе, 1.5 - 3А при езде танка. 133 rpm на выходе металлического редуктора (редуктор 1:150), 170 rpm на ведущем катке танка (за счет дополнительной напечатанной пары шестерни). Опорные катки - спаренные с подшипниками, в качестве имитации резины на них напечатаны накладки из TPU.
Демонстрация езды (видео)
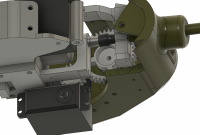
- Ленивцы умеют регулировать натяжение гусениц, осуществляется это с помощью спроектированного напечатанного механизма и мощной сервы TIANKONGRC 8125MG на 25кг.

- Есть независимая псевдоторсионная подвеска на каждый опорный каток (за основной элемент взята торсионная пружина/пружина кручения). Первые и последние пары опорных катков дополнительно усилены пружинами растяжения, т.к. они удерживают каркас гусеницы

- Умеет стрелять, пробивает картонную коробку с 2 м насквозь. Основа - страйкбольный цилиндр и сконструированный напечатанный механизм взвода/спуска поршня. Взводится сервой постоянного вращения DS3115MG, спускается ей же. Главная неполнозубая шестерня напечатана из нейлона.
- Умеет вращать башней в обе стороны на 360 с регулировкой скорости в зависимости от степени отклонения стиков. В качестве двигателя - маленький мотор-редуктор на 6V с али (Bringsmart).

- Умеет вертикально наводить орудие с фиксированной медленной скоростью. Двигатель - серва SG92R (Wavgat) с напечатанным редуктором.
- Перезарядка осуществляется сервоприводом SG92R, который дергает затвор туда-сюда, на конце которого герметичная проставка скользит по носу цилиндра и через еще одну проставку из TPU запихивает шарик прямо в металлический ствол. Шарики же подаются сверху по специальному каналу, вмещается боекомплект всего на 5 выстрелов.
Демонстрация работы механизма перезарядки (видео)
- Есть FPV камера, встроенная в маску орудия (эффект управления изнутри + удобно целиться). Камера-приемник и передатчик идут отдельно и не связаны с ардуино. Передатчик подключается к смартфону и видеосигнал, соответственно, передает туда же. Питание на камеру поступает с контроллера танка.
Демонстрация стрельбы и работы FPV (видео)
- Управляется ардуино нано (1 в пульте-передатчике и 1 в плате-контроллере-приемнике) с радиомодулями NRF2401L+. Очень большое время, около полугода в совокупности, заняли у меня танцы с бубнами с этими модулями радиосвязи, чтобы они работали четко как надо и без каких-либо глюков. В итоге проблемы решились чудесным образом, просто используя библиотеки ардуино от Э+М.
- Собственно, схема и фото почти собранной платы второй ревизии передатчика:
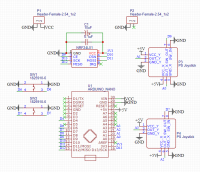

А вот так выглядит начинка пульта первой ревизии, который я использую до сих пор. Тут я уже заменил дешманские джойстики KY023 на джойстики от PS2 c али (просто небо и земля). Выглядит все крайне колхозно, да, но, думаю, что через такое проходят все")

Питается пульт от одной 18650 через повышающий преобразователь до 5.5V. Есть маленький тумблер включения, разъем для зарядки - он же защитный модуль от перезаряда/переразряда и КЗ, а также индикатор заряда (тот самый огромный с 4 светящимися палками в виде нарисованной батарейки). Под новую плату пульт еще не смоделировал, но он точно будет не такой колхозный и толстый. Планирую также развести отдельную плату под всю развязку питания.
- Приемник, он же контроллер и основная плата танка представляет собой по сути макет-конструктор на разведенной в easyeda плате:
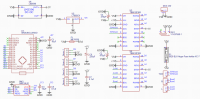
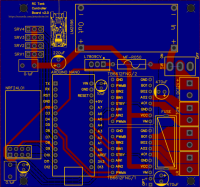

Вкратце об устройстве: при включении тумблера подается 12v с аккумулятора, который представляет собой 3 спаянные 18650 с платой BMS. Далее питание идет по 3 цепям: 12V уходят на питание моторов через драйверы, а к одному из драйверов - через предохранитель на 6A. Другая дорожка идет на преобразователь LM2596, откуда на выходе 5V идут на питание сервоприводов, а также отдельно питает драйверы моторов (питание драйверов решил сделать отдельное из-за горького опыта платы прошлой ревизии, где связка драйверов питалась от ардуины). 3 дорожка через предохранитель идет на преобразователь LM7809CV, откуда уже 9V поступает на вход ардуины нано. Решил именно так разбить питание, исходя из опыта прошлого макета, где сгорели сначала драйверы, а потом ардуина, т.к. я не рассчитал возможности 2 мощных мотор-редукторов вот, как это выглядело раньше:

Питание сервоприводов решил сделать отдельное через такой преобразователь, т.к. 4 штуки, 3 из которых жрут достаточно много, более 1А. Модуль преобразователя даже при сильной загрузке всех 4 серв ведет себя прекрасно. Естественно, пробовал сначала LM7805CV, но даже с огромным радиатором он быстро нагревался до 90 градусов.
Почему предохранитель и почему он стоит только перед 1 драйвером на схеме, минуя второй? Потому что один драйвер отвечает только за вращение башни, где потребление менее 1А, за него я не переживал. А вот второй, точнее бутерброд из 4-х запараллеленных, отвечает за главные ходовые двигатели, которые в среднем при движении потребляют 4-5А, с препятствиями до 6. Боялся, что даже рассчитанный 4Х Бутерброд может сгореть из-за высоких стартовых токов, поэтому перестраховался (по правде говоря, связки из 3 паралелльных драйверов уже хватило бы), дабы не перепаивать потом это все. Один раз удалось сжечь предохранитель - какой-то кусок ковра намотался на вал и один мотор заклинило.
Про драйверы: их я подбирал и тестировал очень долго. Т.к. сначала стояли маленькие 270 моторы, стояли и драйверы слабенькие - L293D, которых едва хватало. Потом был эксперимент с сервами постоянного вращения и, соответственно, без драйверов. Но поняв, что регулировать их обороты или невозможно, или я просто не разобрался, перешел опять к идее с моторами-редукторами, но на этот раз заказал 390 (270 очевидно слабенькие для такого масштаба и веса). Драйверы оставил старые, но заказал десяток микросхем и запараллелил их в 4 штуки (на фото выше). Проработало минуты 2, и даже с радиатором, пошел от этих драйвером белый дым. Искал замену помощнее, заказал десяток L298N. Но не успел их попробовать, т.к. откопал у себя красную платку с TB6612FNG и решил остановиться на нем. Привлекло в нем еще то, что можно отдельно включать/выключать драйвер ардуиной (спойлер - не понадобилось), однако только много позже сообразил, что на это задействуется 2 лишних рабочих пина ардуины, что меня в корне не устраивает. Главное преимущественно такого драйвера в том, что он способен пропускать 1.2А непрерывно на каждый канал особо не нагреваясь, а в пике (кратковременно) - до 3А на канал. Когда тестировал моторы - по неосторожности сжег один. Затем попробовал связку в 2 паралельных драйвера и тоже, насилуя моторы, еле-еле, но сжег. Заказал еще десяток (на то время стоили около 30р/шт) и решил для себя, что 4 штуки точно хватит с хорошим запасом. Так и остался этот бутерброд, который даже не намекает на какой-то нагрев, насилуя моторы резкими стартами и т.п. А уж про холостую работу и говорить не приходится.

Ну а пока выбирал этот вариант, успел заказать на всякий случай монстры BTS7960B с большим радиатором, но, благо, не пригодились.
Как вы поняли, я задействовал ардуино нано по максимуму, хотя хотелось бы, конечно, еще добавить, например, парогенератор для имитации выхлопных газов, а также динамик со звуками работы дизельного двигателя.
Есть мысль доделать плату до состояния не конструктора, а полностью готового устройства с хорошо спроектированной платой, где на борту будет все это в единой плоскости, возможно даже в SMD исполнении (когда я немного потренируюсь с этим).
Изменено: