Всем привет! Имеется несколько комплектов ЖД Fenfa. Масштаб 1/87, рельсы - пластик, локомотивы на батарейках (2шт. АА),
в общем обычная, но не самая дешманская железная дорога. Замечательно то, что рельсы можно покупать отдельно и построить ЖД любых размеров.
Задача: Перевести всё в автоматический режим, а также управление вручную со смартфона.
Прикинул схему для начинки поезда:
- ESP-32 (у меня они есть)
- Модуль датчика освещенности на фоторезисторе (установка - днище поезда, фоторезистор смотрит на рельсы)
- Датчик препятствия (модуль YL-63) (установка - в нос поезда, чтобы избежать столкновения с другими поездами)
- Сенсорная кнопка TTP223 (триггер, один клик - поезд едет вперед, второй клик - стоп)
Схема ЖД путей (см. рисунок):
На рисунке указаны метки:
- Красные - это датчики препятствия типа KY-033
- Зеленые - это светодиоды
- На каждой стрелке будет установлено по одной сервомашинке типа SG90
- ESP-32

Алгоритм движения. Имеется (пока что) два поезда, идущие на встречу друг другу, когда один из поездов наезжает на Красную метку - включаются светодидоды (зеленые метки),
встроенные в рельсы, фоторезистор Второго поезда фиксирует сигнал светодиода и даёт команду остановить поезд до тех пор, пока не переведутся стрелки и не проедет Первый
поезд. Сервами, датчиками и светодиодами на рельсах будет управлять ESP-32.
На этом я затупил и что делать дальше не соображу. В написании кода не силён, залить скетч в Arduino IDE проблем нет, много девайсов собрал. Сейчас изучаю FLProg, Blynk и думаю,
что для идентификации поездов можно создать сеть из ESP-32. ESP32 на рельсах - Точка доступа, ESP32 на поездах - клиенты. Плюсом ESP-32 есть наличие Bluetooth, для управления
со смартфона (Приложение RemoteXY и т.д.). Здесь я тоже не понял, можно ли управлять и через WiFi, и через Bluetooth одновременно? И надо ли вообще?
Если у кого-то есть какие пожелания, советы, буду очень благодарен. Ткните носом куда копать. Надеюсь продолжение следует")
в общем обычная, но не самая дешманская железная дорога. Замечательно то, что рельсы можно покупать отдельно и построить ЖД любых размеров.
Задача: Перевести всё в автоматический режим, а также управление вручную со смартфона.
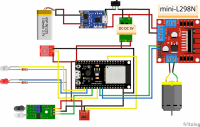
Прикинул схему для начинки поезда:
- В локомотивы вместо штатных батареек - 1 банка Li-ion/Li-Po + модуль зарядки TP4056 USB
- Повышающий преобразователь напряжения SX1308 2-28V 2A
- ESP-32 (у меня они есть)
- Модуль датчика освещенности на фоторезисторе (установка - днище поезда, фоторезистор смотрит на рельсы)
- Датчик препятствия (модуль YL-63) (установка - в нос поезда, чтобы избежать столкновения с другими поездами)
- Сенсорная кнопка TTP223 (триггер, один клик - поезд едет вперед, второй клик - стоп)
Схема ЖД путей (см. рисунок):
На рисунке указаны метки:
- Красные - это датчики препятствия типа KY-033
- Зеленые - это светодиоды
- На каждой стрелке будет установлено по одной сервомашинке типа SG90
- ESP-32
Алгоритм движения. Имеется (пока что) два поезда, идущие на встречу друг другу, когда один из поездов наезжает на Красную метку - включаются светодидоды (зеленые метки),
встроенные в рельсы, фоторезистор Второго поезда фиксирует сигнал светодиода и даёт команду остановить поезд до тех пор, пока не переведутся стрелки и не проедет Первый
поезд. Сервами, датчиками и светодиодами на рельсах будет управлять ESP-32.
На этом я затупил и что делать дальше не соображу. В написании кода не силён, залить скетч в Arduino IDE проблем нет, много девайсов собрал. Сейчас изучаю FLProg, Blynk и думаю,
что для идентификации поездов можно создать сеть из ESP-32. ESP32 на рельсах - Точка доступа, ESP32 на поездах - клиенты. Плюсом ESP-32 есть наличие Bluetooth, для управления
со смартфона (Приложение RemoteXY и т.д.). Здесь я тоже не понял, можно ли управлять и через WiFi, и через Bluetooth одновременно? И надо ли вообще?
Если у кого-то есть какие пожелания, советы, буду очень благодарен. Ткните носом куда копать. Надеюсь продолжение следует