
поигрался с драйверами TMC2209 с UART. Хотелось попробовать, как работает StallGuard ( определение остановки двигателя без дополнительных сенсоров / датчиков). Работает. В качестве концевиков выступает любое препятствие крану (бортик, например). В прошивке можно отслеживать нагрузку на мотор и после определённого порога отключать питание и сбрасывать положение, например . Из плюсов я бы отметил то, что отпадает необходимость в концевиках (получается два уже в комплекте - min, max). Из минусов - дополнительные два провода к драйверу (ТХ, RX), итого пять: STEP, DIR, EN, TX, RX.
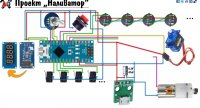
ARDUINO Наливатор. Обсуждение проекта
- Автор темы AlexGyver
- Дата начала
@VICLER, Чем можно управлять через TX-RX ? не будет ли слишком медленно ?
Когда подключал DF плеер и я постоянно (часто) опрашивал его по SoftSerial о статусе , работает или нет, то мелодия начинала заикаться. Если опрашивать раз в секунду, то еще более менее, хотя подтормаживания проскакивали, поэтому пришлось снимать занятость по отдельному пину.
Если на носике отслеживать "упирание" в оба края, то лучще RX TX - как бы универсально получается. Если только определять 0, то можно и по одному концевику кмк.
Когда подключал DF плеер и я постоянно (часто) опрашивал его по SoftSerial о статусе , работает или нет, то мелодия начинала заикаться. Если опрашивать раз в секунду, то еще более менее, хотя подтормаживания проскакивали, поэтому пришлось снимать занятость по отдельному пину.
Если на носике отслеживать "упирание" в оба края, то лучще RX TX - как бы универсально получается. Если только определять 0, то можно и по одному концевику кмк.
@Старик Похабыч, управляется по прежнему по Step/Dir. Uart нужен для отслеживания нагрузки на мотор. Так же можно устанавливать микрошаг и ток программно. Подключать лучше к аппаратному uart.
Вообще, если не пугает установка обычного концевика, то лучше наверно заморочиться с ним. И на один вывод МК больше и прошивка легче
Вообще, если не пугает установка обычного концевика, то лучше наверно заморочиться с ним. И на один вывод МК больше и прошивка легче
Парни, залил прошивку от левонти. Всё работает, но не прокачивается помпа от энкодера (после окончания чаепития). С сервой вообще беда какая то, дергается при движении и наливании, что может быть?Пробовал закинуть новую библиотеку от Алекса, серва вообще крутится как ей вздемаетсяДобрый день!
Новая версия скейтча под дисплей 1602
Изменено:
В этой прошивке прокачка только над 1 рюмкой если оная установленна.Парни, залил прошивку от левонти. Всё работает, но не прокачивается помпа от энкодера (после окончания чаепития). С сервой вообще беда какая то, дергается при движении и наливании, что может быть?Пробовал закинуть новую библиотеку от Алекса, серва вообще крутится как ей вздемается
@Димка-Хулиган, серва она такая, еще она не любит одновременной работы со светодиодной лентой почемуто. поэтому в какой то из таких прошивок было отключение сервы при достижении нужного положения. Т.е. постоянно аттач и детач сервы, если там по шагам идет.
на каждый светодиод нужно будет по 1 цифровому пину, это на 1 цвет. если светодиод RGB , то по 3. Ну и скетч переписать изрядно. Оно надо ? У меня при подключении всей тряхомузыки и шаговика свободных пинов просто нет. При подключении сервы будет 4 свободных пина - что то можно сделать.
А кто нибудь знает где можно поменять рюмки местами. А то спаялось так, что первая это последняя. В скетче я исправил так:В этой прошивке прокачка только над 1 рюмкой если оная установленна.
// положение серво над центрами рюмок
const byte shotPos[] = {140, 110, 80, 50};
Вместо:
const byte shotPos[] = {50, 80, 110, 140};
Но хочется по правильному сделать.
Может тут надо наоборот написать?
const byte SW_pins[] = {A0, A1, A2, A3};
Изменено:
Да логично все, просто в моей локации адресную ленту найти оч. сложно. А ждать из китая - долго. Просто у Алекса интереснее проект, буду пробовать реализовывать другой без дисплея.на каждый светодиод нужно будет по 1 цифровому пину, это на 1 цвет. если светодиод RGB , то по 3. Ну и скетч переписать изрядно. Оно надо ? У меня при подключении всей тряхомузыки и шаговика свободных пинов просто нет. При подключении сервы будет 4 свободных пина - что то можно сделать.
@Димка-Хулиган,
Но теперь светодиоды не правильно загораются.
Да, действительно достаточно было поменять местами const byte SW_pins[] = {A0, A1, A2, A3}А кто нибудь знает где можно поменять рюмки местами. А то спаялось так, что первая это последняя. В скетче я исправил так:
// положение серво над центрами рюмок
const byte shotPos[] = {140, 110, 80, 50};
Вместо:
const byte shotPos[] = {50, 80, 110, 140};
Но хочется по правильному сделать.
Может тут надо наоборот написать?
const byte SW_pins[] = {A0, A1, A2, A3};
Но теперь светодиоды не правильно загораются.
Диоды пришлось перепаять. Дерганье сервы исправил увеличением скорости:
servo.setSpeed(140);
servo.setAccel(0.9);
Но теперь краник не успевает доехать а уже наливает (в ручном режиме). Подскажите как сделать задержку перед наливанием.
servo.setSpeed(140);
servo.setAccel(0.9);
Но теперь краник не успевает доехать а уже наливает (в ручном режиме). Подскажите как сделать задержку перед наливанием.
почти закончен третий
В этом наливаторе будет ещё одна доп функция: микс из двух напитков) осталось только прошивку написать
В этом наливаторе будет ещё одна доп функция: микс из двух напитков) осталось только прошивку написать
Изменено:
Очень круто! Такая плавность на шаговике? На каком если не секрет?почти закончен третий
В этом наливаторе будет ещё одна доп функция: микс из двух напитков) осталось только прошивку написать
@kostyaskv,

решил сделать в этот раз крепление из 8мм алюминиевого цилиндра. Крепится к двигателю на два болтика с двух сторон. В следующий раз просто распечатаю.
решил сделать в этот раз крепление из 8мм алюминиевого цилиндра. Крепится к двигателю на два болтика с двух сторон. В следующий раз просто распечатаю.
Очень круто! А скетч под шаговик опубликовать есть возможность, под один напиток, пожалуйста)почти закончен третий
В этом наливаторе будет ещё одна доп функция: микс из двух напитков) осталось только прошивку написать
Поделиться: